#include <ekf_slam_solver.hpp>
Public Member Functions | |
| EKFSLAMSolver (const SLAMParameters ¶ms, std::shared_ptr< DataAssociationModel > data_association, std::shared_ptr< V2PMotionModel > motion_model, std::shared_ptr< LandmarkFilter > landmark_filter, std::shared_ptr< std::vector< double > > execution_times, std::shared_ptr< LoopClosure > loop_closure) | |
| void | add_velocities (const common_lib::structures::Velocities &velocities) override |
| Executed to deal with new velocity data. | |
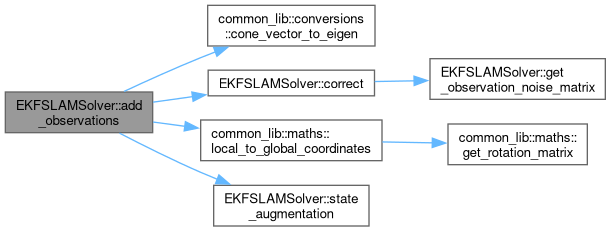
| void | add_observations (const std::vector< common_lib::structures::Cone > &positions, rclcpp::Time cones_timestamp) override |
| process obervations of landmarks | |
| void | load_initial_state (const Eigen::VectorXd &map, const Eigen::Vector3d &pose) override |
| Initialize the EKF SLAM solver with a previously saved map and pose. | |
| Eigen::MatrixXd | get_covariance () override |
| Get the covariance matrix of the EKF. | |
| int | get_lap_counter () override |
| Get the lap counter. | |
| Eigen::VectorXi | get_associations () const override |
| Eigen::VectorXd | get_observations_global () const override |
| Eigen::VectorXd | get_map_coordinates () const override |
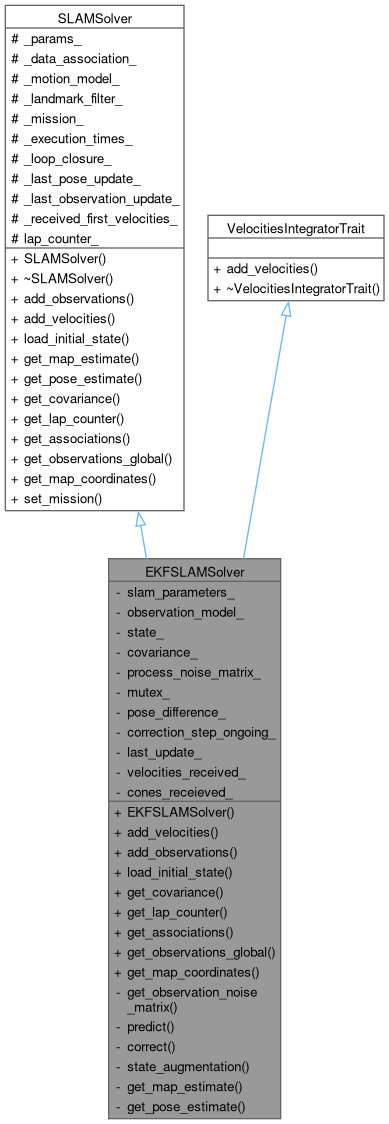
 Public Member Functions inherited from SLAMSolver Public Member Functions inherited from SLAMSolver | |
| SLAMSolver (const SLAMParameters ¶ms, std::shared_ptr< DataAssociationModel > data_association, std::shared_ptr< V2PMotionModel > motion_model, std::shared_ptr< LandmarkFilter > landmark_filter, std::shared_ptr< std::vector< double > > execution_times, std::shared_ptr< LoopClosure > loop_closure) | |
| Construct a new SLAMSolver object. | |
| virtual | ~SLAMSolver ()=default |
| void | set_mission (common_lib::competition_logic::Mission mission) |
| Set the mission. | |
| Public Member Functions inherited from VelocitiesIntegratorTrait | |
| virtual | ~VelocitiesIntegratorTrait ()=default |
Private Member Functions | |
| Eigen::MatrixXd | get_observation_noise_matrix (int num_landmarks) const |
| Get the observation noise matrix object used in the correction step of the EKF with the right dimensions. | |
| void | predict (Eigen::VectorXd &state, Eigen::MatrixXd &covariance, const Eigen::MatrixXd &process_noise_matrix, const rclcpp::Time last_update, const common_lib::structures::Velocities &velocities) |
| executed when velocity data is received. | |
| void | correct (Eigen::VectorXd &state, Eigen::MatrixXd &covariance, const std::vector< int > &observed_landmarks_indices, const Eigen::VectorXd &matched_observations) |
| correction step of the EKF that updates the state and covariance based on the observed landmarks | |
| void | state_augmentation (Eigen::VectorXd &state, Eigen::MatrixXd &covariance, const Eigen::VectorXd &new_landmarks) |
| add new landmarks to the state vector and covariance matrix | |
| std::vector< common_lib::structures::Cone > | get_map_estimate () override |
| Get the map estimate object. | |
| common_lib::structures::Pose | get_pose_estimate () override |
| Get the pose estimate object. | |
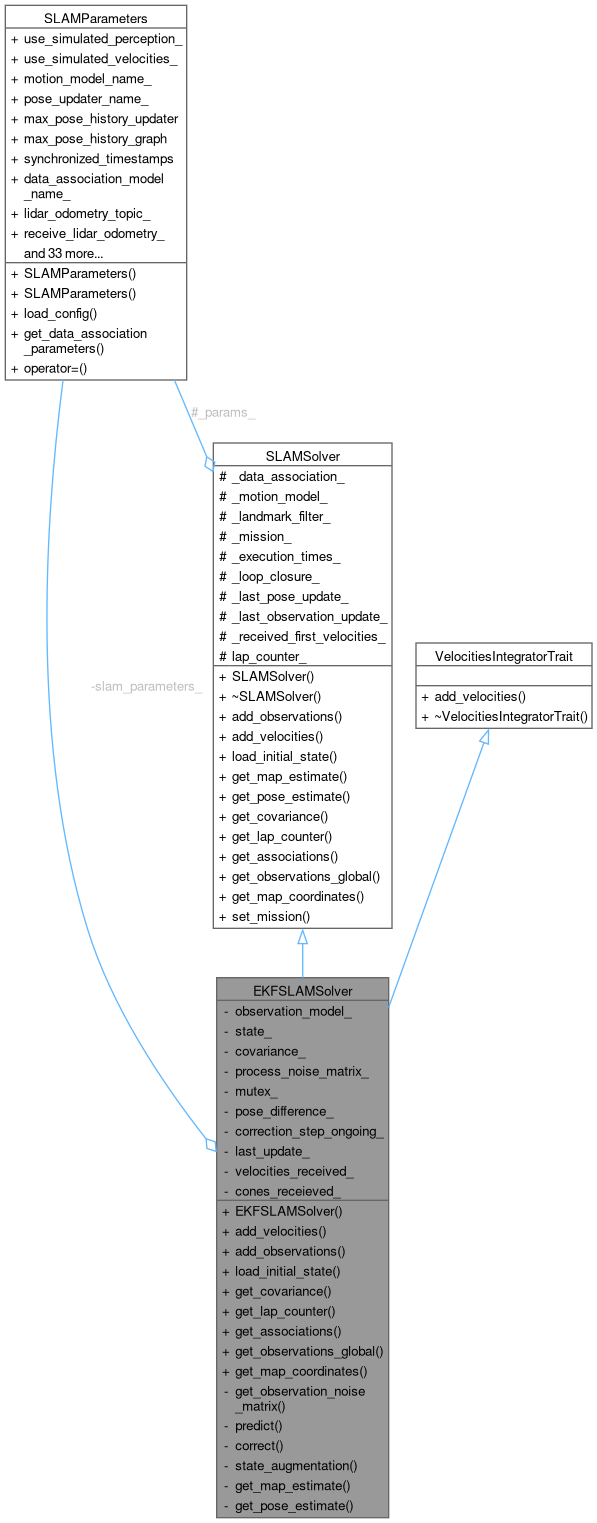
Private Attributes | |
| SLAMParameters | slam_parameters_ |
| std::shared_ptr< SLAMObservationModel > | observation_model_ |
| Eigen::VectorXd | state_ = Eigen::VectorXd::Zero(3) |
| Eigen::MatrixXd | covariance_ |
| Eigen::MatrixXd | process_noise_matrix_ |
| std::shared_mutex | mutex_ |
| Eigen::Vector3d | pose_difference_ = Eigen::Vector3d::Zero() |
| bool | correction_step_ongoing_ = false |
| rclcpp::Time | last_update_ |
| bool | velocities_received_ = false |
| bool | cones_receieved_ = false |
Friends | |
| class | EKFSLAMSolverTest_stateAugmentation_Test |
| class | EKFSLAMSolverTest_stateAugmentation2_Test |
Additional Inherited Members | |
| Protected Attributes inherited from SLAMSolver | |
| SLAMParameters | _params_ |
| std::shared_ptr< DataAssociationModel > | _data_association_ |
| std::shared_ptr< V2PMotionModel > | _motion_model_ |
| std::shared_ptr< LandmarkFilter > | _landmark_filter_ |
| common_lib::competition_logic::Mission | _mission_ = common_lib::competition_logic::Mission::NONE |
| std::shared_ptr< std::vector< double > > | _execution_times_ |
| std::shared_ptr< LoopClosure > | _loop_closure_ |
| rclcpp::Time | _last_pose_update_ = rclcpp::Time(0) |
| rclcpp::Time | _last_observation_update_ = rclcpp::Time(0) |
| bool | _received_first_velocities_ |
| int | lap_counter_ = 0 |
Detailed Description
Definition at line 12 of file ekf_slam_solver.hpp.
Constructor & Destructor Documentation
◆ EKFSLAMSolver()
| EKFSLAMSolver::EKFSLAMSolver | ( | const SLAMParameters & | params, |
| std::shared_ptr< DataAssociationModel > | data_association, | ||
| std::shared_ptr< V2PMotionModel > | motion_model, | ||
| std::shared_ptr< LandmarkFilter > | landmark_filter, | ||
| std::shared_ptr< std::vector< double > > | execution_times, | ||
| std::shared_ptr< LoopClosure > | loop_closure | ||
| ) |
Definition at line 3 of file ekf_slam_solver.cpp.
Member Function Documentation
◆ add_observations()
|
overridevirtual |
process obervations of landmarks
- Parameters
-
position
Implements SLAMSolver.
Definition at line 47 of file ekf_slam_solver.cpp.
◆ add_velocities()
|
overridevirtual |
Executed to deal with new velocity data.
- Parameters
-
velocities
Implements SLAMSolver.
Definition at line 33 of file ekf_slam_solver.cpp.

◆ correct()
|
private |
correction step of the EKF that updates the state and covariance based on the observed landmarks
- Parameters
-
state state vector previouslt to the correction step covariance covariance matrix previously to the correction step matched_landmarks_indices indexes of the x coordinate of landmarks in the state vector that were observed matched_observations landmarks in the state vector that were observed, in the form {x_cone_1, y_cone_1, x_cone_2, y_cone_2, ...}
Definition at line 138 of file ekf_slam_solver.cpp.


◆ get_associations()
|
inlineoverridevirtual |
Implements SLAMSolver.
Definition at line 143 of file ekf_slam_solver.hpp.
◆ get_covariance()
|
inlineoverridevirtual |
Get the covariance matrix of the EKF.
- Returns
- Eigen::MatrixXd covariance matrix
Implements SLAMSolver.
Definition at line 134 of file ekf_slam_solver.hpp.
◆ get_lap_counter()
|
inlineoverridevirtual |
Get the lap counter.
- Returns
- int lap counter
Implements SLAMSolver.
Definition at line 141 of file ekf_slam_solver.hpp.
◆ get_map_coordinates()
|
inlineoverridevirtual |
Implements SLAMSolver.
Definition at line 145 of file ekf_slam_solver.hpp.
◆ get_map_estimate()
|
overrideprivatevirtual |
Get the map estimate object.
- Returns
- std::vector<common_lib::structures::Cone>
Implements SLAMSolver.
Definition at line 191 of file ekf_slam_solver.cpp.
◆ get_observation_noise_matrix()
|
private |
Get the observation noise matrix object used in the correction step of the EKF with the right dimensions.
- Parameters
-
num_landmarks number of observed landmarks in a given EKF correction step
- Returns
- Eigen::MatrixXd
Definition at line 23 of file ekf_slam_solver.cpp.

◆ get_observations_global()
|
inlineoverridevirtual |
Implements SLAMSolver.
Definition at line 144 of file ekf_slam_solver.hpp.
◆ get_pose_estimate()
|
overrideprivatevirtual |
Get the pose estimate object.
- Returns
- common_lib::structures::Pose
Implements SLAMSolver.
Definition at line 207 of file ekf_slam_solver.cpp.
◆ load_initial_state()
|
overridevirtual |
Initialize the EKF SLAM solver with a previously saved map and pose.
Simply copies the map and pose into the state vector and covariance matrix.
- Returns
- Eigen::VectorXd state vector
Implements SLAMSolver.
Definition at line 175 of file ekf_slam_solver.cpp.
◆ predict()
|
private |
executed when velocity data is received.
Prediction step of the EKF which is meant to capture changes in the state of the system
- Parameters
-
state vector with position and orientation, followed by the landmark positions {car_x, car_y, car_theta, x_cone_1, y_cone_1, x_cone_2, y_cone_2, ...} covariance process_noise_matrix estimated process noise last_update last time velocity data was received velocities new velocity data
Definition at line 111 of file ekf_slam_solver.cpp.

◆ state_augmentation()
|
private |
add new landmarks to the state vector and covariance matrix
Expands the covariance matrix which originally has the structure: P = [ Pcc, Pcl Plc, Pll] To include the new landmarks, the covariance matrix is expanded to: P = [ Pcc, Pcl, Pcn Plc, Pll, Pln Pnc, Pnl, Pnn] consider C to be the car's position and orientation, L to be the landmarks that were already in the state vector and N to be the new landmarks to be added to the state vector: Pcc is the covariance of C with C, Pcl is the covariance of C with L, Plc is the covariance of L with C, ...
The new landmarks are added to the state vector after being converted to the global frame.
- Parameters
-
state state vector with the car's position and orientation, followed by the landmarks in the form {car_x, car_y, car_theta, x_cone_1, y_cone_1, x_cone_2, y_cone_2, ...} covariance covariance matrix of the state vector new_landmarks new landmarks in the form {x_cone_1, y_cone_1, x_cone_2, y_cone_2, ...} in the car's frame
Definition at line 155 of file ekf_slam_solver.cpp.

Friends And Related Symbol Documentation
◆ EKFSLAMSolverTest_stateAugmentation2_Test
|
friend |
Definition at line 96 of file ekf_slam_solver.hpp.
◆ EKFSLAMSolverTest_stateAugmentation_Test
|
friend |
Definition at line 95 of file ekf_slam_solver.hpp.
Member Data Documentation
◆ cones_receieved_
|
private |
Definition at line 25 of file ekf_slam_solver.hpp.
◆ correction_step_ongoing_
|
private |
Definition at line 20 of file ekf_slam_solver.hpp.
◆ covariance_
|
private |
Definition at line 16 of file ekf_slam_solver.hpp.
◆ last_update_
|
private |
Definition at line 22 of file ekf_slam_solver.hpp.
◆ mutex_
|
private |
Definition at line 18 of file ekf_slam_solver.hpp.
◆ observation_model_
|
private |
Definition at line 14 of file ekf_slam_solver.hpp.
◆ pose_difference_
|
private |
Definition at line 19 of file ekf_slam_solver.hpp.
◆ process_noise_matrix_
|
private |
Definition at line 17 of file ekf_slam_solver.hpp.
◆ slam_parameters_
|
private |
Definition at line 13 of file ekf_slam_solver.hpp.
◆ state_
|
private |
Definition at line 15 of file ekf_slam_solver.hpp.
◆ velocities_received_
|
private |
Definition at line 24 of file ekf_slam_solver.hpp.
The documentation for this class was generated from the following files:
- src/slam/include/slam_solver/ekf_slam_solver.hpp
- src/slam/src/slam_solver/ekf_slam_solver.cpp