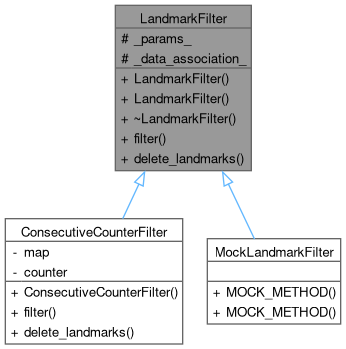
This class is meant to filter observations from perception to try to reduce the presence of outliers.
More...
#include <base_landmark_filter.hpp>
|
| | LandmarkFilter ()=default |
| |
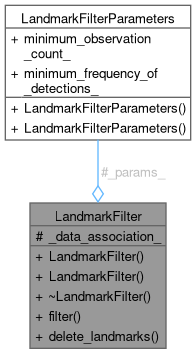
| | LandmarkFilter (LandmarkFilterParameters params, std::shared_ptr< DataAssociationModel > data_association) |
| |
| virtual | ~LandmarkFilter ()=default |
| |
| virtual Eigen::VectorXd | filter (const Eigen::VectorXd &observations, const Eigen::VectorXd &observation_confidences, Eigen::VectorXi &associations)=0 |
| | This function receives a new set of observations and returns a filtered set of landmarks in global coordinates that are ready to be added to be added to the map.
|
| |
| virtual void | delete_landmarks (const Eigen::VectorXd &some_landmarks)=0 |
| | Used by SLAM to signal to the filter that the landmarks are already in SLAM's map, and they should no longer be returned by the filter as new.
|
| |
This class is meant to filter observations from perception to try to reduce the presence of outliers.
Definition at line 14 of file base_landmark_filter.hpp.
◆ LandmarkFilter() [1/2]
| LandmarkFilter::LandmarkFilter |
( |
| ) |
|
|
default |
◆ LandmarkFilter() [2/2]
◆ ~LandmarkFilter()
| virtual LandmarkFilter::~LandmarkFilter |
( |
| ) |
|
|
virtualdefault |
◆ delete_landmarks()
| virtual void LandmarkFilter::delete_landmarks |
( |
const Eigen::VectorXd & |
some_landmarks | ) |
|
|
pure virtual |
Used by SLAM to signal to the filter that the landmarks are already in SLAM's map, and they should no longer be returned by the filter as new.
- Parameters
-
| some_landmarks | landmarks to be deleted in the form of [x1, y1, x2, y2, ...] in the global frame |
Implemented in ConsecutiveCounterFilter.
◆ filter()
| virtual Eigen::VectorXd LandmarkFilter::filter |
( |
const Eigen::VectorXd & |
observations, |
|
|
const Eigen::VectorXd & |
observation_confidences, |
|
|
Eigen::VectorXi & |
associations |
|
) |
| |
|
pure virtual |
This function receives a new set of observations and returns a filtered set of landmarks in global coordinates that are ready to be added to be added to the map.
- Parameters
-
| observations | Observations in the form of [x1, y1, x2, y2, ...] in the global frame |
| observation_confidences | Confidence in the observations in the same order as the observations |
| associations | Associations of observations to landmarks |
- Returns
- Eigen::VectorXd the filtered observations in the form of [x1, y1, x2, y2, ...] in the global frame
Implemented in ConsecutiveCounterFilter.
◆ _data_association_
◆ _params_
The documentation for this class was generated from the following file: