#include <consecutive_counter_filter.hpp>
Public Member Functions | |
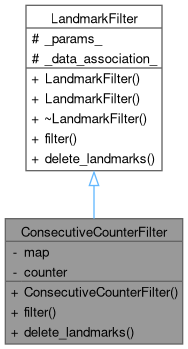
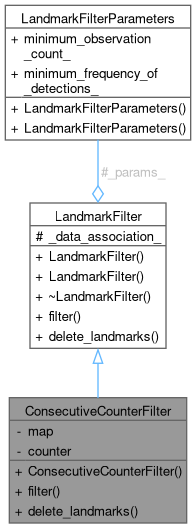
| ConsecutiveCounterFilter (LandmarkFilterParameters params, std::shared_ptr< DataAssociationModel > data_association) | |
| Eigen::VectorXd | filter (const Eigen::VectorXd &observations, const Eigen::VectorXd &observation_confidences, Eigen::VectorXi &associations) override |
| This function receives a new set of observations and returns a filtered set of landmarks in global coordinates that are ready to be added to be added to the map. | |
| void | delete_landmarks (const Eigen::VectorXd &some_landmarks) override |
| Used by SLAM to signal to the filter that the landmarks are already in SLAM's map, and they should no longer be returned by the filter as new. | |
 Public Member Functions inherited from LandmarkFilter Public Member Functions inherited from LandmarkFilter | |
| LandmarkFilter ()=default | |
| LandmarkFilter (LandmarkFilterParameters params, std::shared_ptr< DataAssociationModel > data_association) | |
| virtual | ~LandmarkFilter ()=default |
Private Attributes | |
| Eigen::VectorXd | map |
| Eigen::VectorXi | counter |
Friends | |
| class | ConsecutiveCounterFilter_TestCase1_Test |
Additional Inherited Members | |
| Protected Attributes inherited from LandmarkFilter | |
| LandmarkFilterParameters | _params_ |
| std::shared_ptr< DataAssociationModel > | _data_association_ |
Detailed Description
Definition at line 6 of file consecutive_counter_filter.hpp.
Constructor & Destructor Documentation
◆ ConsecutiveCounterFilter()
|
inline |
Definition at line 12 of file consecutive_counter_filter.hpp.
Member Function Documentation
◆ delete_landmarks()
|
overridevirtual |
Used by SLAM to signal to the filter that the landmarks are already in SLAM's map, and they should no longer be returned by the filter as new.
- Parameters
-
some_landmarks landmarks to be deleted in the form of [x1, y1, x2, y2, ...] in the global frame
Implements LandmarkFilter.
Definition at line 84 of file consecutive_counter_filter.cpp.
◆ filter()
|
overridevirtual |
This function receives a new set of observations and returns a filtered set of landmarks in global coordinates that are ready to be added to be added to the map.
This filter keeps track of how many consecutive times an observation has been seen. If an observation has been seen more than minimum_observation_count_ times consecutively, it is added to the map and returned as a new landmark. If an observation is not seen in a given call to filter, its counter is reset.
- Parameters
-
observations Observations in the form of [x1, y1, x2, y2, ...] in the global frame observation_confidences Confidence in the observations in the same order as the observations
- Returns
- Eigen::VectorXd the filtered observations in the form of [x1, y1, x2, y2, ...] in the global frame
Implements LandmarkFilter.
Definition at line 6 of file consecutive_counter_filter.cpp.
Friends And Related Symbol Documentation
◆ ConsecutiveCounterFilter_TestCase1_Test
Definition at line 34 of file consecutive_counter_filter.hpp.
Member Data Documentation
◆ counter
|
private |
Definition at line 9 of file consecutive_counter_filter.hpp.
◆ map
|
private |
Definition at line 8 of file consecutive_counter_filter.hpp.
The documentation for this class was generated from the following files:
- src/perception_sensor_lib/include/perception_sensor_lib/landmark_filter/consecutive_counter_filter.hpp
- src/perception_sensor_lib/src/landmark_filter/consecutive_counter_filter.cpp