Loading...
Searching...
No Matches
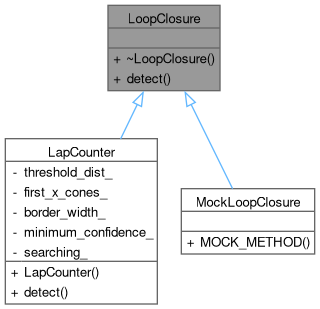
LoopClosure Class Referenceabstract
Interface for detecting loop closures. More...
#include <loop_closure.hpp>
Inheritance diagram for LoopClosure:
Collaboration diagram for LoopClosure:
Classes | |
| struct | Result |
| Result of loop closure detection. More... | |
Public Member Functions | |
| virtual | ~LoopClosure ()=default |
| virtual Result | detect (const Eigen::Vector3d ¤t_pose, const Eigen::VectorXd &map_cones, const Eigen::VectorXi &associations, const Eigen::VectorXd &observations) const =0 |
| Call every time you have new observations. | |
Detailed Description
Interface for detecting loop closures.
Definition at line 11 of file loop_closure.hpp.
Constructor & Destructor Documentation
◆ ~LoopClosure()
|
virtualdefault |
Member Function Documentation
◆ detect()
|
pure virtual |
Call every time you have new observations.
- Parameters
-
current_pose your latest pose in world frame map_cones full map of cones (in insertion order) associations one entry per observation: >=3 → matched map_cones[(j-3)/2] -1 → new landmark, -2 → no match observations raw observations
- Returns
- result indicating if loop closure was detected
Implemented in LapCounter.
The documentation for this class was generated from the following file:
- src/perception_sensor_lib/include/perception_sensor_lib/loop_closure/loop_closure.hpp