Parameters for the SLAM node. More...
#include <general_config.hpp>
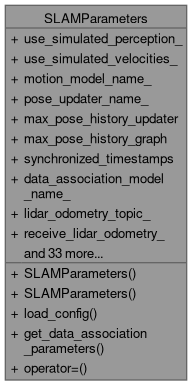
Public Member Functions | |
| SLAMParameters ()=default | |
| SLAMParameters (const SLAMParameters ¶ms) | |
| std::string | load_config () |
| Load the configuration for the SLAM node from YAML file. | |
| DataAssociationParameters | get_data_association_parameters () |
| Get data association parameters. | |
| SLAMParameters & | operator= (const SLAMParameters &other) |
| Overload the assignment operator for SLAMParameters. | |
Friends | |
| std::ostream & | operator<< (std::ostream &os, const SLAMParameters ¶ms) |
| Overload the output stream operator for SLAMParameters. | |
Detailed Description
Parameters for the SLAM node.
Definition at line 12 of file general_config.hpp.
Constructor & Destructor Documentation
◆ SLAMParameters() [1/2]
|
default |
◆ SLAMParameters() [2/2]
| SLAMParameters::SLAMParameters | ( | const SLAMParameters & | params | ) |
Definition at line 7 of file general_config.cpp.
Member Function Documentation
◆ get_data_association_parameters()
|
inline |
Get data association parameters.
- Returns
- DataAssociationParameters
Definition at line 85 of file general_config.hpp.
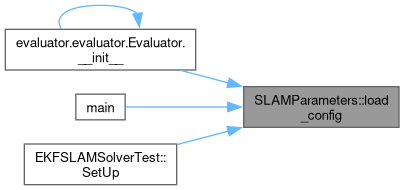
◆ load_config()
| std::string SLAMParameters::load_config | ( | ) |
Load the configuration for the SLAM node from YAML file.
- Returns
- std::string adapter_name
Definition at line 104 of file general_config.cpp.

◆ operator=()
| SLAMParameters & SLAMParameters::operator= | ( | const SLAMParameters & | other | ) |
Overload the assignment operator for SLAMParameters.
- Parameters
-
other SLAMParameters object to assign from
- Returns
- SLAMParameters& Reference to the assigned SLAMParameters object
Definition at line 54 of file general_config.cpp.
Friends And Related Symbol Documentation
◆ operator<<
|
friend |
Overload the output stream operator for SLAMParameters.
- Parameters
-
os Output stream params SLAMParameters object
- Returns
- std::ostream& Output stream
Definition at line 97 of file general_config.hpp.
Member Data Documentation
◆ angular_velocity_noise_
| float SLAMParameters::angular_velocity_noise_ = 0.1 |
Definition at line 36 of file general_config.hpp.
◆ border_width
| int SLAMParameters::border_width = 5 |
Definition at line 62 of file general_config.hpp.
◆ data_association_gate_
| double SLAMParameters::data_association_gate_ = 1.23 |
Definition at line 42 of file general_config.hpp.
◆ data_association_limit_distance_
| float SLAMParameters::data_association_limit_distance_ |
Definition at line 28 of file general_config.hpp.
◆ data_association_model_name_
| std::string SLAMParameters::data_association_model_name_ = "nearest_neighbor" |
Definition at line 22 of file general_config.hpp.
◆ first_x_cones
| int SLAMParameters::first_x_cones = 10 |
Definition at line 61 of file general_config.hpp.
◆ frame_id_
| std::string SLAMParameters::frame_id_ = "map" |
Definition at line 27 of file general_config.hpp.
◆ imu_acceleration_x_noise_
| float SLAMParameters::imu_acceleration_x_noise_ = 0.5 |
Definition at line 37 of file general_config.hpp.
◆ landmark_filter_name_
| std::string SLAMParameters::landmark_filter_name_ = "consecutive_count" |
Definition at line 26 of file general_config.hpp.
◆ lidar_odometry_topic_
| std::string SLAMParameters::lidar_odometry_topic_ = "/fast_limo/state" |
Definition at line 23 of file general_config.hpp.
◆ max_pose_history_graph
| int SLAMParameters::max_pose_history_graph = 50 |
Definition at line 19 of file general_config.hpp.
◆ max_pose_history_updater
| int SLAMParameters::max_pose_history_updater = 30 |
Definition at line 18 of file general_config.hpp.
◆ minimum_confidence
| int SLAMParameters::minimum_confidence = 3 |
Definition at line 63 of file general_config.hpp.
◆ minimum_frequency_of_detections_
| double SLAMParameters::minimum_frequency_of_detections_ |
Definition at line 69 of file general_config.hpp.
◆ minimum_observation_count_
| int SLAMParameters::minimum_observation_count_ |
Definition at line 67 of file general_config.hpp.
◆ motion_model_name_
| std::string SLAMParameters::motion_model_name_ = "constant_velocity" |
Definition at line 15 of file general_config.hpp.
◆ new_landmark_confidence_gate_
| double SLAMParameters::new_landmark_confidence_gate_ = 0.6 |
Definition at line 43 of file general_config.hpp.
◆ observation_x_noise_
| float SLAMParameters::observation_x_noise_ |
Definition at line 30 of file general_config.hpp.
◆ observation_y_noise_
| float SLAMParameters::observation_y_noise_ |
Definition at line 32 of file general_config.hpp.
◆ pose_theta_initial_noise_
| double SLAMParameters::pose_theta_initial_noise_ = 0.1 |
Definition at line 40 of file general_config.hpp.
◆ pose_updater_name_
| std::string SLAMParameters::pose_updater_name_ = "base_pose_updater" |
Definition at line 16 of file general_config.hpp.
◆ pose_x_initial_noise_
| double SLAMParameters::pose_x_initial_noise_ = 0.1 |
Definition at line 38 of file general_config.hpp.
◆ pose_y_initial_noise_
| double SLAMParameters::pose_y_initial_noise_ = 0.1 |
Definition at line 39 of file general_config.hpp.
◆ preloaded_map_noise_
| double SLAMParameters::preloaded_map_noise_ = 0.1 |
Definition at line 41 of file general_config.hpp.
◆ publish_trajectory_
| bool SLAMParameters::publish_trajectory_ = false |
Definition at line 57 of file general_config.hpp.
◆ receive_lidar_odometry_
| bool SLAMParameters::receive_lidar_odometry_ = false |
Definition at line 24 of file general_config.hpp.
◆ slam_isam2_factorization_
| std::string SLAMParameters::slam_isam2_factorization_ = "QR" |
Definition at line 55 of file general_config.hpp.
◆ slam_isam2_relinearize_skip_
| double SLAMParameters::slam_isam2_relinearize_skip_ = 1 |
Definition at line 54 of file general_config.hpp.
◆ slam_isam2_relinearize_threshold_
| double SLAMParameters::slam_isam2_relinearize_threshold_ = 0.1 |
Definition at line 53 of file general_config.hpp.
◆ slam_min_pose_difference_
| double SLAMParameters::slam_min_pose_difference_ |
Definition at line 45 of file general_config.hpp.
◆ slam_optimization_in_poses_
| bool SLAMParameters::slam_optimization_in_poses_ = false |
Definition at line 51 of file general_config.hpp.
◆ slam_optimization_mode_
| std::string SLAMParameters::slam_optimization_mode_ = "sync" |
Definition at line 50 of file general_config.hpp.
◆ slam_optimization_period_
| double SLAMParameters::slam_optimization_period_ = 0.0 |
Definition at line 47 of file general_config.hpp.
◆ slam_optimization_type_
| std::string SLAMParameters::slam_optimization_type_ = "normal_levenberg" |
Definition at line 49 of file general_config.hpp.
◆ slam_solver_name_
| std::string SLAMParameters::slam_solver_name_ = "graph_slam" |
Definition at line 25 of file general_config.hpp.
◆ sliding_window_size_
| unsigned int SLAMParameters::sliding_window_size_ = 5 |
Definition at line 56 of file general_config.hpp.
◆ synchronized_timestamps
| bool SLAMParameters::synchronized_timestamps |
Definition at line 20 of file general_config.hpp.
◆ threshold_dist
| double SLAMParameters::threshold_dist = 4.0 |
Definition at line 60 of file general_config.hpp.
◆ use_simulated_perception_
| bool SLAMParameters::use_simulated_perception_ = false |
Definition at line 13 of file general_config.hpp.
◆ use_simulated_velocities_
| bool SLAMParameters::use_simulated_velocities_ = false |
Definition at line 14 of file general_config.hpp.
◆ using_preloaded_map_
| bool SLAMParameters::using_preloaded_map_ = false |
Definition at line 44 of file general_config.hpp.
◆ velocity_x_noise_
| float SLAMParameters::velocity_x_noise_ = 0.1 |
Definition at line 34 of file general_config.hpp.
◆ velocity_y_noise_
| float SLAMParameters::velocity_y_noise_ = 0.1 |
Definition at line 35 of file general_config.hpp.
The documentation for this struct was generated from the following files:
- src/slam/include/slam_config/general_config.hpp
- src/slam/src/slam_config/general_config.cpp