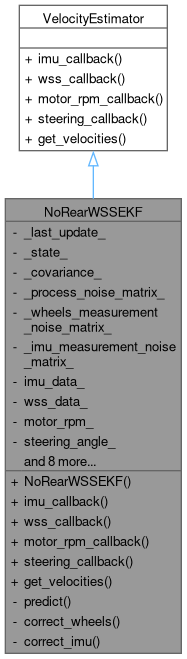
#include <no_rear_wss_ekf.hpp>
|
| void | predict (Eigen::Vector3d &state, Eigen::Matrix3d &covariance, const Eigen::Matrix3d &process_noise_matrix, const rclcpp::Time last_update, common_lib::sensor_data::ImuData &imu_data) |
| | Predict velocities at the next index based on IMU measurements and current state.
|
| |
| void | correct_wheels (Eigen::Vector3d &state, Eigen::Matrix3d &covariance, common_lib::sensor_data::WheelEncoderData &wss_data, double motor_rpm, double steering_angle) |
| | Correct the state estimate based on wheel speed sensor, resolver, and steering data.
|
| |
| void | correct_imu (Eigen::Vector3d &state, Eigen::Matrix3d &covariance, common_lib::sensor_data::ImuData &imu_data) |
| |
Definition at line 17 of file no_rear_wss_ekf.hpp.
◆ NoRearWSSEKF()
◆ correct_imu()
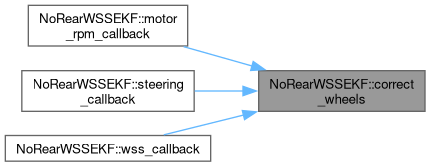
◆ correct_wheels()
Correct the state estimate based on wheel speed sensor, resolver, and steering data.
This function updates the state and covariance estimates using measurements from the wheel speed sensor, resolver, and steering angle sensor. It corrects the predicted state to better match the observed measurements.
- Parameters
-
| state | Vector of velocities {velocity_x, velocity_y, rotational_velocity} |
| covariance | Covariance matrix representing the uncertainty in the state estimate. |
| wss_data | Wheel speed sensor data containing wheel speeds. |
| motor_rpm | data representing the motor's rpms. |
| steering_angle | data representing the steering angle. |
Definition at line 125 of file no_rear_wss_ekf.cpp.
◆ get_velocities()
◆ imu_callback()
◆ motor_rpm_callback()
| void NoRearWSSEKF::motor_rpm_callback |
( |
double |
motor_rpm | ) |
|
|
overridevirtual |
Callback function for the motor RPM data that should be called by adapters when new motor RPM data is available.
Implements VelocityEstimator.
Definition at line 62 of file no_rear_wss_ekf.cpp.
◆ predict()
| void NoRearWSSEKF::predict |
( |
Eigen::Vector3d & |
state, |
|
|
Eigen::Matrix3d & |
covariance, |
|
|
const Eigen::Matrix3d & |
process_noise_matrix, |
|
|
const rclcpp::Time |
last_update, |
|
|
common_lib::sensor_data::ImuData & |
imu_data |
|
) |
| |
|
private |
Predict velocities at the next index based on IMU measurements and current state.
- Parameters
-
| state | Vector of velocities {velocity_x, velocity_y, rotational_velocity} |
| covariance | Covariance matrix representing the uncertainty in the state estimate. |
| process_noise_matrix | Process noise matrix representing the uncertainty in the process model. |
| last_update | Time point of the last update. |
| imu_data | IMU data containing acceleration and rotational velocity measurements. |
Definition at line 106 of file no_rear_wss_ekf.cpp.
◆ steering_callback()
| void NoRearWSSEKF::steering_callback |
( |
double |
steering_angle | ) |
|
|
overridevirtual |
Callback function for the steering angle data that should be called by adapters when new steering angle data is available.
Implements VelocityEstimator.
Definition at line 78 of file no_rear_wss_ekf.cpp.
◆ wss_callback()
Callback function for the wheel speed sensor data that should be called by adapters when new wheel speed sensor data is available.
Implements VelocityEstimator.
Definition at line 46 of file no_rear_wss_ekf.cpp.
◆ _covariance_
| Eigen::Matrix3d NoRearWSSEKF::_covariance_ = Eigen::Matrix3d::Identity() * 0.05 |
|
private |
◆ _has_made_prediction_
| bool NoRearWSSEKF::_has_made_prediction_ = false |
|
private |
◆ _imu_measurement_noise_matrix_
| Eigen::MatrixXd NoRearWSSEKF::_imu_measurement_noise_matrix_ |
|
private |
◆ _last_update_
| rclcpp::Time NoRearWSSEKF::_last_update_ |
|
private |
◆ _process_noise_matrix_
| Eigen::Matrix3d NoRearWSSEKF::_process_noise_matrix_ |
|
private |
◆ _state_
| Eigen::Vector3d NoRearWSSEKF::_state_ = Eigen::Vector3d::Zero() |
|
private |
◆ _wheels_measurement_noise_matrix_
| Eigen::MatrixXd NoRearWSSEKF::_wheels_measurement_noise_matrix_ |
|
private |
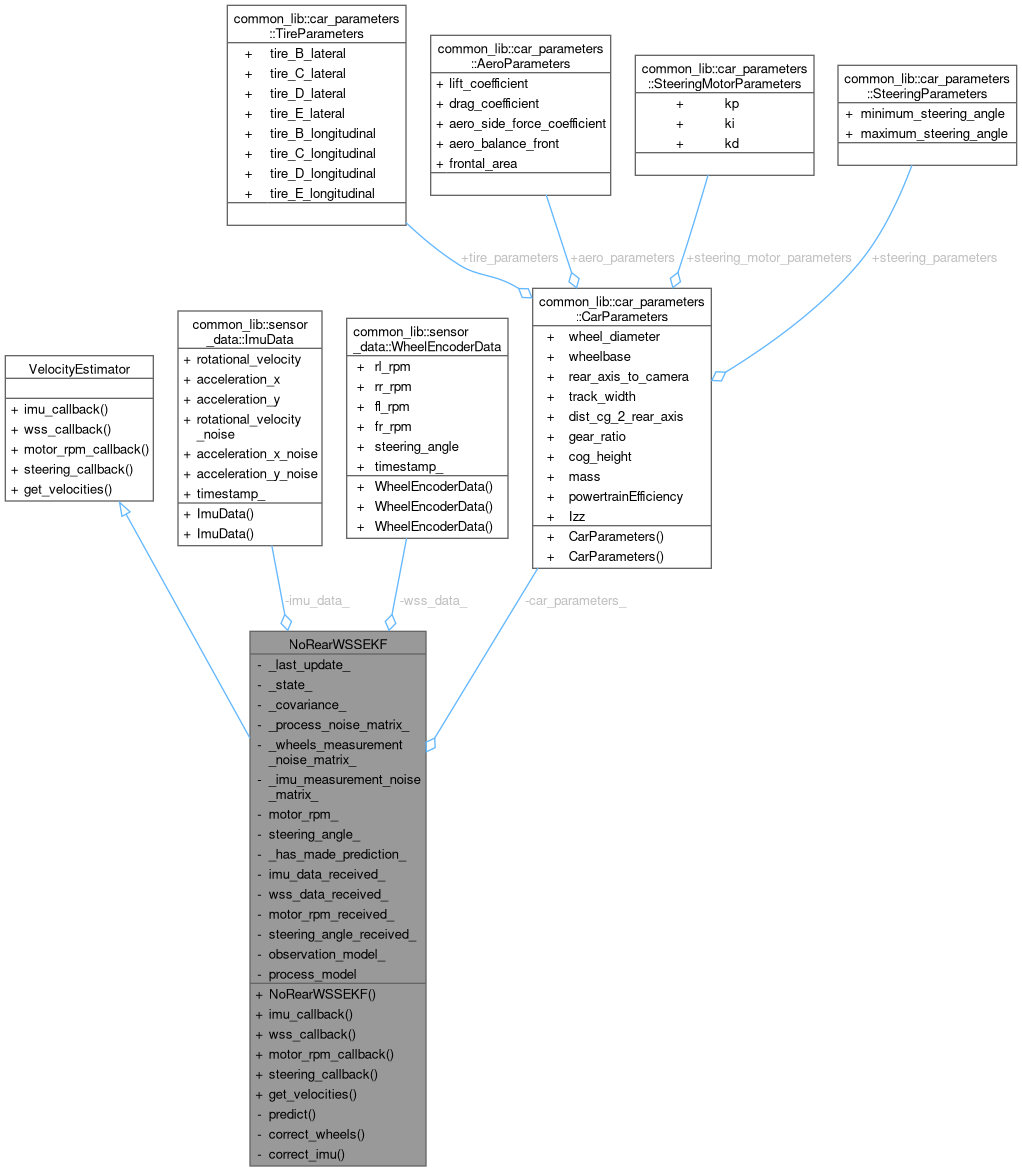
◆ car_parameters_
◆ imu_data_
◆ imu_data_received_
| bool NoRearWSSEKF::imu_data_received_ = false |
|
private |
◆ motor_rpm_
| double NoRearWSSEKF::motor_rpm_ |
|
private |
◆ motor_rpm_received_
| bool NoRearWSSEKF::motor_rpm_received_ = false |
|
private |
◆ observation_model_
◆ process_model
◆ steering_angle_
| double NoRearWSSEKF::steering_angle_ |
|
private |
◆ steering_angle_received_
| bool NoRearWSSEKF::steering_angle_received_ = false |
|
private |
◆ wss_data_
◆ wss_data_received_
| bool NoRearWSSEKF::wss_data_received_ = false |
|
private |
The documentation for this class was generated from the following files: