Loading...
Searching...
No Matches
BaseVelocityProcessModel Class Referenceabstract
Base class for velocity process models, used to predict the next velocities based on previous velocities and accelerations. More...
#include <base_vel_process_model.hpp>
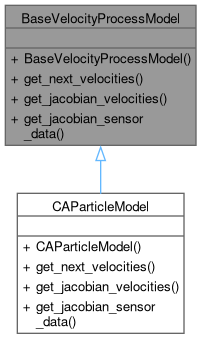
Inheritance diagram for BaseVelocityProcessModel:
Collaboration diagram for BaseVelocityProcessModel:
Public Member Functions | |
| BaseVelocityProcessModel ()=default | |
| virtual Eigen::Vector3d | get_next_velocities (const Eigen::Vector3d &previous_velocities, const Eigen::Vector3d &accelerations, const double time_interval)=0 |
| Returns the next velocities based on the previous velocities and accelerations. | |
| virtual Eigen::Matrix3d | get_jacobian_velocities (const Eigen::Vector3d &previous_velocities, const Eigen::Vector3d &accelerations, const double time_interval)=0 |
| Returns the Jacobian of the velocity process model. | |
| virtual Eigen::Matrix3d | get_jacobian_sensor_data (const Eigen::Vector3d &previous_velocities, const Eigen::Vector3d &accelerations, const double time_interval)=0 |
| Returns the Jacobian of the velocity process model with respect to the accelerations. | |
Detailed Description
Base class for velocity process models, used to predict the next velocities based on previous velocities and accelerations.
Definition at line 10 of file base_vel_process_model.hpp.
Constructor & Destructor Documentation
◆ BaseVelocityProcessModel()
|
default |
Member Function Documentation
◆ get_jacobian_sensor_data()
|
pure virtual |
Returns the Jacobian of the velocity process model with respect to the accelerations.
- Parameters
-
previous_velocities The velocities at the previous time step. accelerations The accelerations applied during the time interval. time_interval The time interval over which the accelerations are applied.
- Returns
- The Jacobian matrix of the velocity process model with respect to the accelerations
Implemented in CAParticleModel.
◆ get_jacobian_velocities()
|
pure virtual |
Returns the Jacobian of the velocity process model.
- Parameters
-
previous_velocities The velocities at the previous time step. accelerations The accelerations applied during the time interval. time_interval The time interval over which the accelerations are applied.
- Returns
- The Jacobian matrix of the velocity process model.
Implemented in CAParticleModel.
◆ get_next_velocities()
|
pure virtual |
Returns the next velocities based on the previous velocities and accelerations.
- Parameters
-
previous_velocities The velocities at the previous time step. accelerations The accelerations applied during the time interval. time_interval The time interval over which the accelerations are applied.
- Returns
- The predicted velocities at the next time step.
Implemented in CAParticleModel.
The documentation for this class was generated from the following file:
- src/motion_lib/include/motion_lib/vel_process_model/base_vel_process_model.hpp