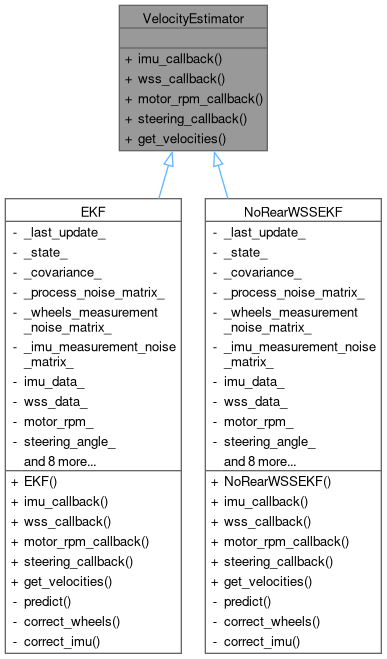
Interface for velocity estimators. More...
#include <estimator.hpp>
Public Member Functions | |
| virtual void | imu_callback (const common_lib::sensor_data::ImuData &imu_data)=0 |
| callback for IMU data that the VENode should call when new IMU data is received | |
| virtual void | wss_callback (const common_lib::sensor_data::WheelEncoderData &wss_data)=0 |
| callback for wheel speed sensor data that the VENode should call when new wheel speed sensor data is received | |
| virtual void | motor_rpm_callback (double motor_rpm)=0 |
| callback for motor RPM data that the VENode should call when new motor RPM data is received | |
| virtual void | steering_callback (double steering_angle)=0 |
| callback for steering angle data that the VENode should call when new steering angle data is received | |
| virtual common_lib::structures::Velocities | get_velocities ()=0 |
Detailed Description
Interface for velocity estimators.
This class defines the interface for velocity estimators. Velocity estimators are used to estimate the vehicle's velocity based on sensor measurements.
Definition at line 12 of file estimator.hpp.
Member Function Documentation
◆ get_velocities()
|
pure virtual |
Implemented in EKF, and NoRearWSSEKF.
◆ imu_callback()
|
pure virtual |
callback for IMU data that the VENode should call when new IMU data is received
Implemented in EKF, and NoRearWSSEKF.
◆ motor_rpm_callback()
|
pure virtual |
callback for motor RPM data that the VENode should call when new motor RPM data is received
Implemented in EKF, and NoRearWSSEKF.
◆ steering_callback()
|
pure virtual |
callback for steering angle data that the VENode should call when new steering angle data is received
Implemented in EKF, and NoRearWSSEKF.
◆ wss_callback()
|
pure virtual |
callback for wheel speed sensor data that the VENode should call when new wheel speed sensor data is received
Implemented in EKF, and NoRearWSSEKF.
The documentation for this class was generated from the following file:
- src/velocity_estimation/include/estimators/estimator.hpp