Loading...
Searching...
No Matches
VENode Class Reference
Node class for the velocity estimation node. More...
#include <node.hpp>
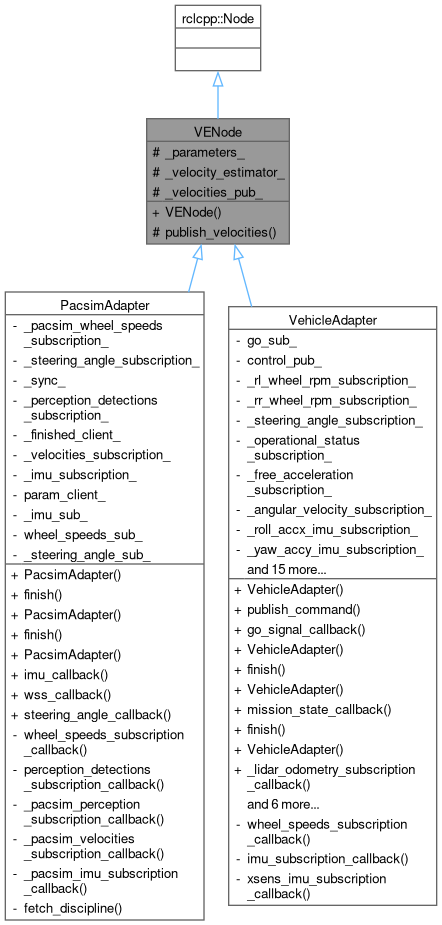
Inheritance diagram for VENode:
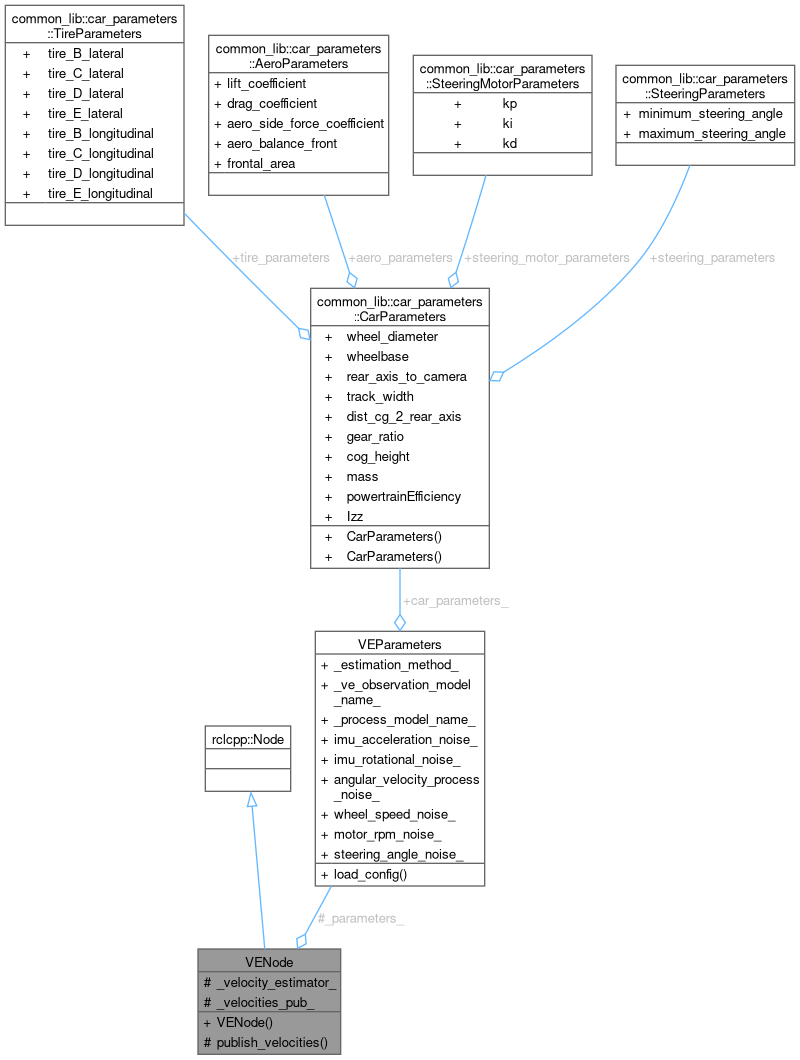
Collaboration diagram for VENode:
Public Member Functions | |
| VENode (const VEParameters ¶meters) | |
Protected Member Functions | |
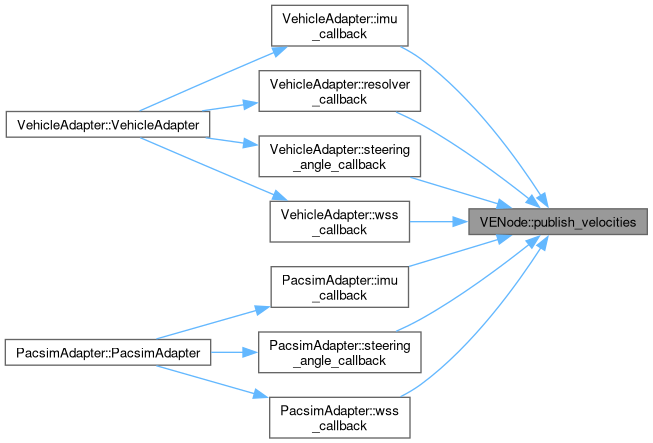
| void | publish_velocities () const |
Protected Attributes | |
| VEParameters | _parameters_ |
| std::shared_ptr< VelocityEstimator > | _velocity_estimator_ |
| rclcpp::Publisher< custom_interfaces::msg::Velocities >::SharedPtr | _velocities_pub_ |
Detailed Description
Node class for the velocity estimation node.
This class is responsible for creating the velocity estimator and creating a publisher. Subclasses of this class are responsible for subscribing to the necessary topics and passing the data to the velocity estimator. The velocity estimator is then used to estimate the vehicle's velocities.
Constructor & Destructor Documentation
◆ VENode()
| VENode::VENode | ( | const VEParameters & | parameters | ) |
Member Function Documentation
◆ publish_velocities()
|
protected |
Member Data Documentation
◆ _parameters_
|
protected |
◆ _velocities_pub_
|
protected |
◆ _velocity_estimator_
|
protected |
The documentation for this class was generated from the following files: