Loading...
Searching...
No Matches
EufsAdapter Class Reference
Adapter class to interface with the EUFS simulator. More...
#include <eufs.hpp>
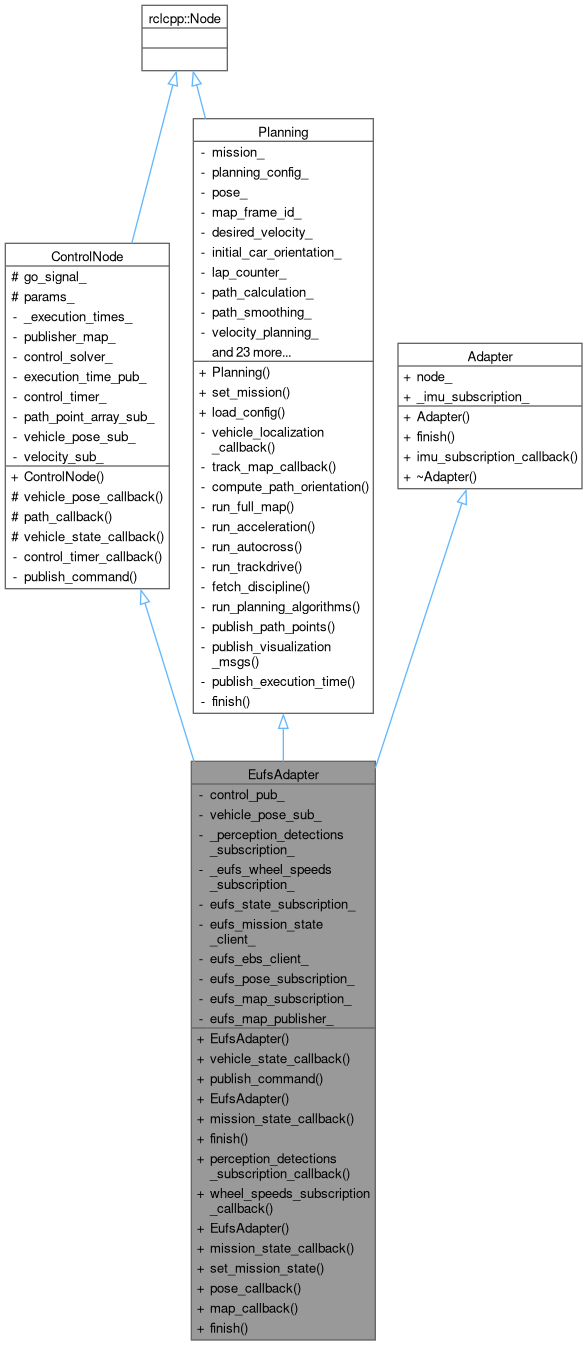
Inheritance diagram for EufsAdapter:
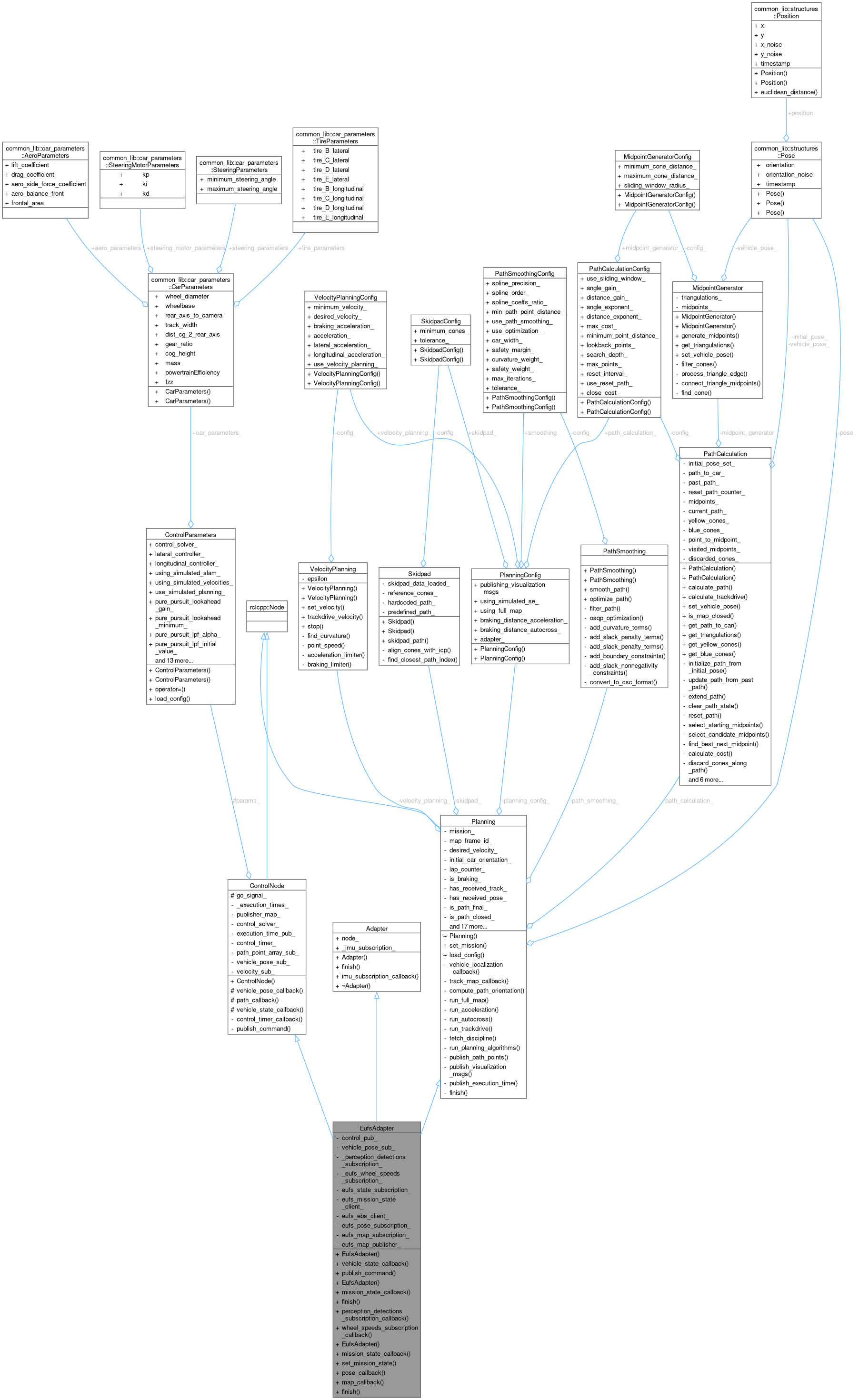
Collaboration diagram for EufsAdapter:
Public Member Functions | |
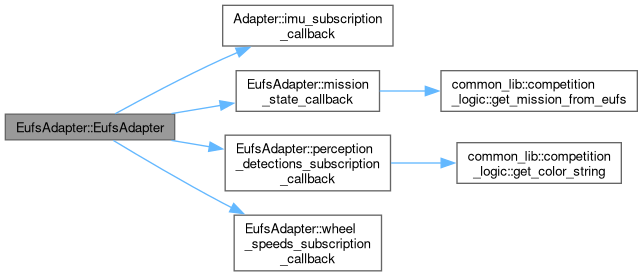
| EufsAdapter (const ControlParameters ¶ms) | |
| void | vehicle_state_callback (const eufs_msgs::msg::CarState &msg) |
| Callback function for velocities and poses, which are coupled in EUFS. | |
| void | publish_command (common_lib::structures::ControlCommand cmd) override |
| Adapters override this function to publish control commands in their environment. | |
| EufsAdapter (std::shared_ptr< SENode > se_node) | |
| void | mission_state_callback (const eufs_msgs::msg::CanState &msg) const |
| void | finish () final |
| Function that sends the finish signal to the respective node. | |
| void | perception_detections_subscription_callback (const eufs_msgs::msg::ConeArrayWithCovariance &msg) const |
| void | wheel_speeds_subscription_callback (const eufs_msgs::msg::WheelSpeedsStamped &msg) const |
| EufsAdapter (const PlanningParameters ¶ms) | |
| void | mission_state_callback (eufs_msgs::msg::CanState msg) |
| void | set_mission_state (int mission, int state) |
| void | pose_callback (const eufs_msgs::msg::CarState &msg) |
| void | map_callback (const eufs_msgs::msg::ConeArrayWithCovariance &msg) |
| void | finish () override |
| Function that sends the finish signal to the respective node. | |
 Public Member Functions inherited from ControlNode Public Member Functions inherited from ControlNode | |
| ControlNode (const ControlParameters ¶ms) | |
| Public Member Functions inherited from Adapter | |
| Adapter (std::shared_ptr< SENode > se_node) | |
| void | imu_subscription_callback (const sensor_msgs::msg::Imu &msg) |
| Function that parses the message sent from the ros IMU topic and calls the respective node's function to update the motion. | |
| virtual | ~Adapter ()=default |
| Public Member Functions inherited from Planning | |
| Planning (const PlanningParameters ¶ms) | |
| Constructs a Planning node with the specified configuration parameters. | |
| void | set_mission (Mission mission) |
| Sets the mission type for planning execution. | |
Private Attributes | |
| rclcpp::Publisher< ackermann_msgs::msg::AckermannDriveStamped >::SharedPtr | control_pub_ |
| rclcpp::Subscription< eufs_msgs::msg::CarState >::SharedPtr | vehicle_pose_sub_ |
| rclcpp::Subscription< eufs_msgs::msg::ConeArrayWithCovariance >::SharedPtr | _perception_detections_subscription_ |
| Subscriber for simulated perception detections. | |
| rclcpp::Subscription< eufs_msgs::msg::WheelSpeedsStamped >::SharedPtr | _eufs_wheel_speeds_subscription_ |
| Subscriber for wheel speeds and steering angle. | |
| rclcpp::Subscription< eufs_msgs::msg::CanState >::SharedPtr | eufs_state_subscription_ |
| rclcpp::Client< eufs_msgs::srv::SetCanState >::SharedPtr | eufs_mission_state_client_ |
| rclcpp::Client< eufs_msgs::srv::SetCanState >::SharedPtr | eufs_ebs_client_ |
| rclcpp::Subscription< eufs_msgs::msg::CarState >::SharedPtr | eufs_pose_subscription_ |
| rclcpp::Subscription< eufs_msgs::msg::ConeArrayWithCovariance >::SharedPtr | eufs_map_subscription_ |
| rclcpp::Publisher< visualization_msgs::msg::MarkerArray >::SharedPtr | eufs_map_publisher_ |
Additional Inherited Members | |
| Static Public Member Functions inherited from Planning | |
| static PlanningParameters | load_config (std::string &adapter) |
| Loads planning configuration from YAML files. | |
| Public Attributes inherited from Adapter | |
| std::shared_ptr< SENode > | node_ |
| rclcpp::Subscription< sensor_msgs::msg::Imu >::SharedPtr | _imu_subscription_ |
| Protected Member Functions inherited from ControlNode | |
| void | vehicle_pose_callback (const custom_interfaces::msg::Pose &msg) |
| Called when a new vehicle pose is received. | |
| void | path_callback (const custom_interfaces::msg::PathPointArray &msg) |
| Called when a new path is received. | |
| void | vehicle_state_callback (const custom_interfaces::msg::Velocities &msg) |
| Called when a new velocity is received. | |
| Protected Attributes inherited from ControlNode | |
| bool | go_signal_ {false} |
| ControlParameters | params_ |
Detailed Description
Adapter class to interface with the EUFS simulator.
Works on a publish-subscribe model. Publishes commands to the simulator in the form of AckermannDriveStamped messages and subscribes to CarState messages if using simulated SLAM.
Constructor & Destructor Documentation
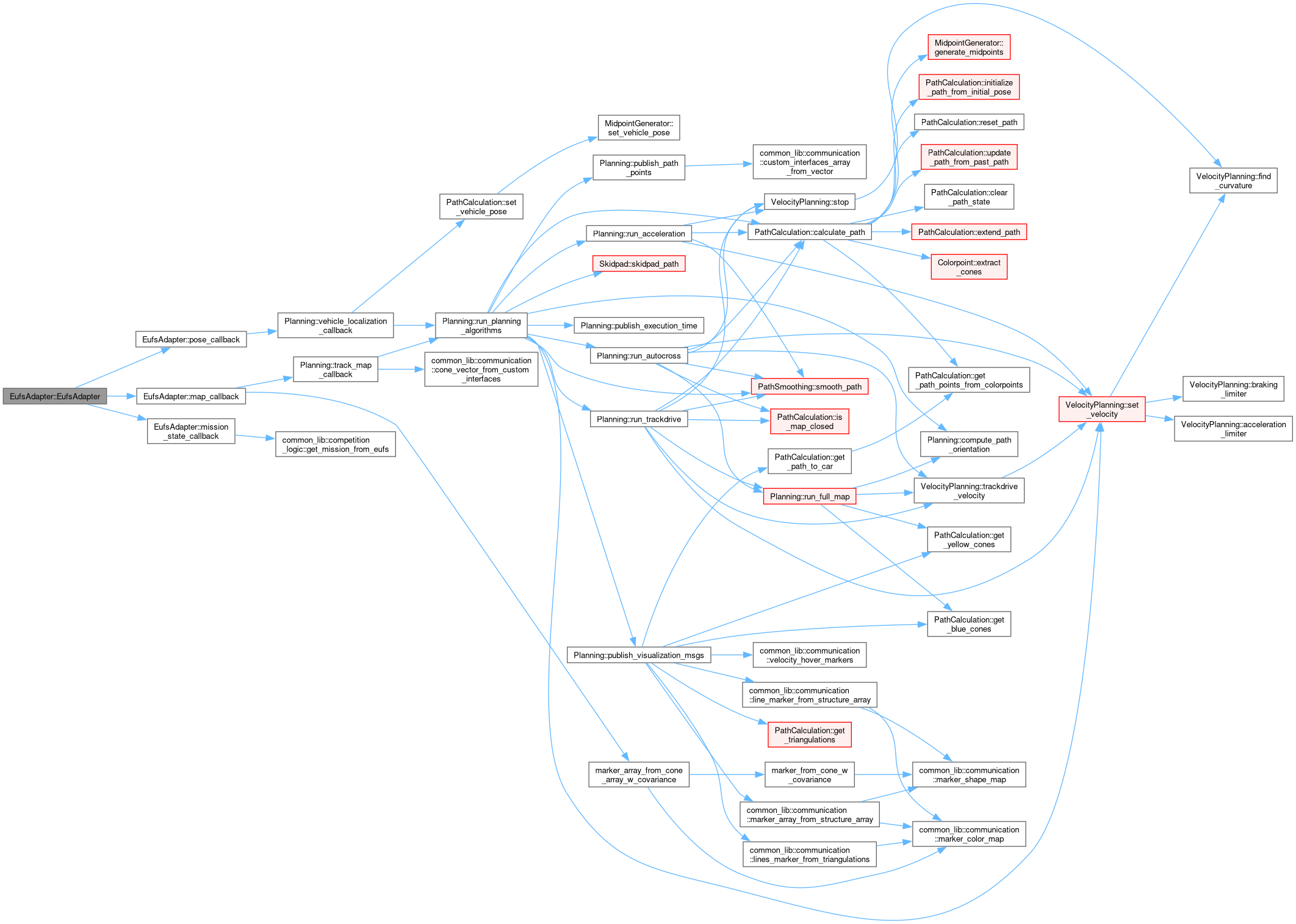
◆ EufsAdapter() [1/3]
|
explicit |

◆ EufsAdapter() [2/3]
|
explicit |
◆ EufsAdapter() [3/3]
|
explicit |
Member Function Documentation
◆ finish() [1/2]
|
finalvirtual |
◆ finish() [2/2]
|
overridevirtual |
Function that sends the finish signal to the respective node.
Implements Adapter.
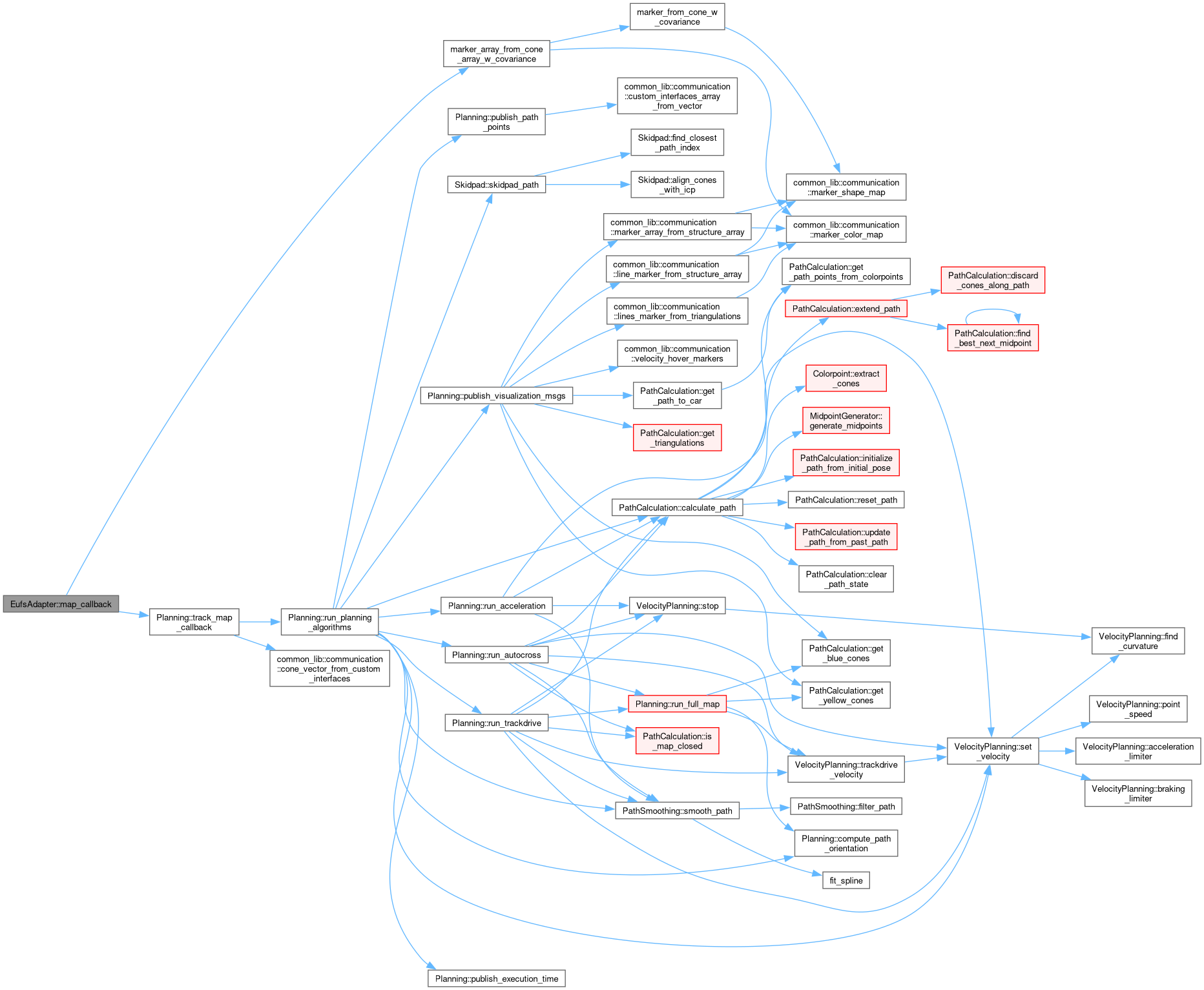
◆ map_callback()
| void EufsAdapter::map_callback | ( | const eufs_msgs::msg::ConeArrayWithCovariance & | msg | ) |

◆ mission_state_callback() [1/2]
| void EufsAdapter::mission_state_callback | ( | const eufs_msgs::msg::CanState & | msg | ) | const |

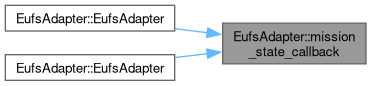
◆ mission_state_callback() [2/2]
| void EufsAdapter::mission_state_callback | ( | eufs_msgs::msg::CanState | msg | ) |

◆ perception_detections_subscription_callback()
| void EufsAdapter::perception_detections_subscription_callback | ( | const eufs_msgs::msg::ConeArrayWithCovariance & | msg | ) | const |


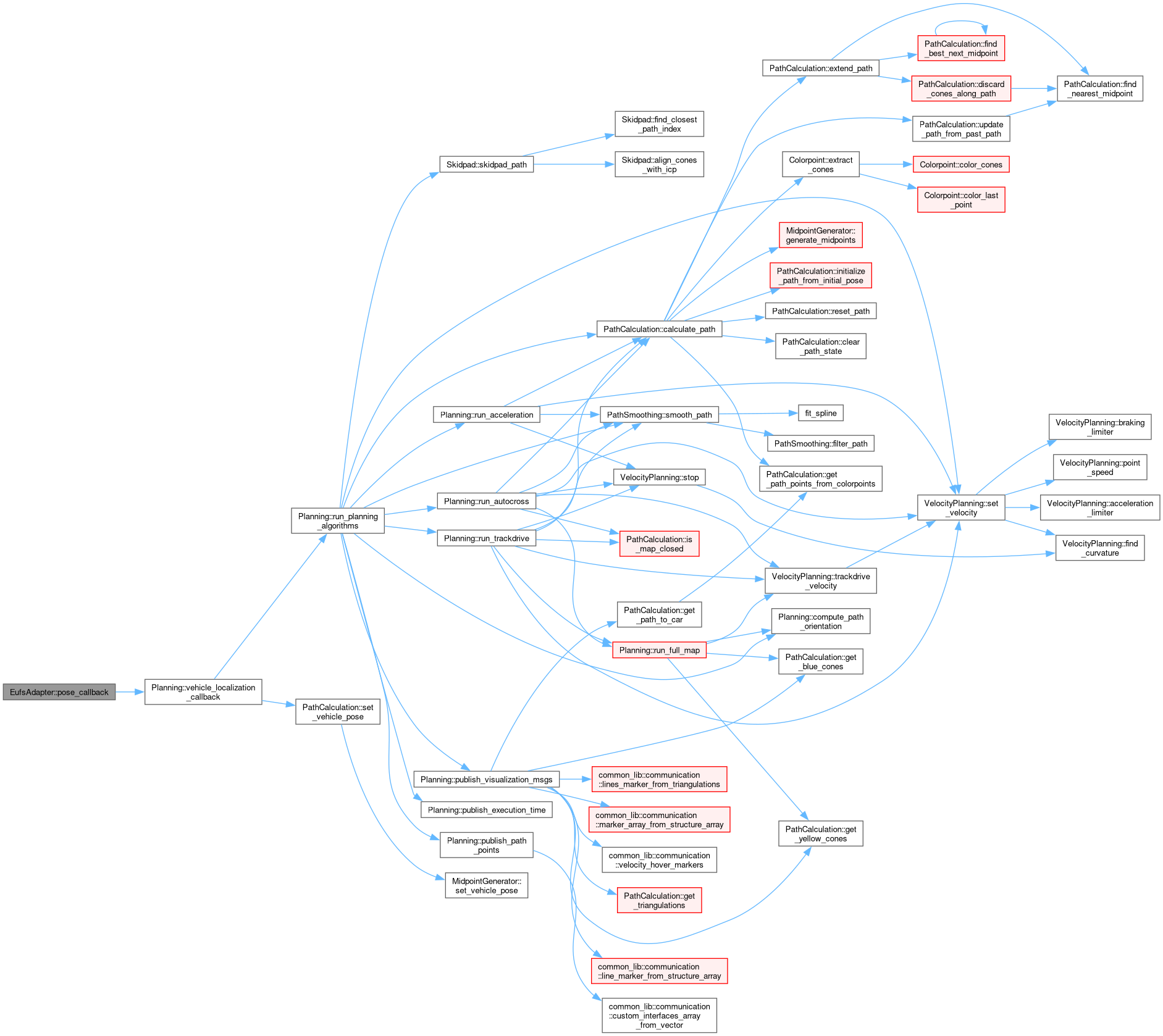
◆ pose_callback()
| void EufsAdapter::pose_callback | ( | const eufs_msgs::msg::CarState & | msg | ) |

◆ publish_command()
|
overridevirtual |
Adapters override this function to publish control commands in their environment.
- Parameters
-
cmd Control command to be published
Implements ControlNode.
◆ set_mission_state()
| void EufsAdapter::set_mission_state | ( | int | mission, |
| int | state | ||
| ) |
◆ vehicle_state_callback()
| void EufsAdapter::vehicle_state_callback | ( | const eufs_msgs::msg::CarState & | msg | ) |


◆ wheel_speeds_subscription_callback()
| void EufsAdapter::wheel_speeds_subscription_callback | ( | const eufs_msgs::msg::WheelSpeedsStamped & | msg | ) | const |

Member Data Documentation
◆ _eufs_wheel_speeds_subscription_
|
private |
◆ _perception_detections_subscription_
|
private |
◆ control_pub_
|
private |
◆ eufs_ebs_client_
|
private |
◆ eufs_map_publisher_
|
private |
◆ eufs_map_subscription_
|
private |
◆ eufs_mission_state_client_
|
private |
◆ eufs_pose_subscription_
|
private |
◆ eufs_state_subscription_
|
private |
◆ vehicle_pose_sub_
|
private |
The documentation for this class was generated from the following files: