Class responsible for the ROS2 communication of the control module. More...
#include <ros_node.hpp>
Public Member Functions | |
| ControlNode (const ControlParameters ¶ms) | |
Protected Member Functions | |
| void | vehicle_pose_callback (const custom_interfaces::msg::Pose &msg) |
| Called when a new vehicle pose is received. | |
| void | path_callback (const custom_interfaces::msg::PathPointArray &msg) |
| Called when a new path is received. | |
| void | vehicle_state_callback (const custom_interfaces::msg::Velocities &msg) |
| Called when a new velocity is received. | |
Protected Attributes | |
| bool | go_signal_ {false} |
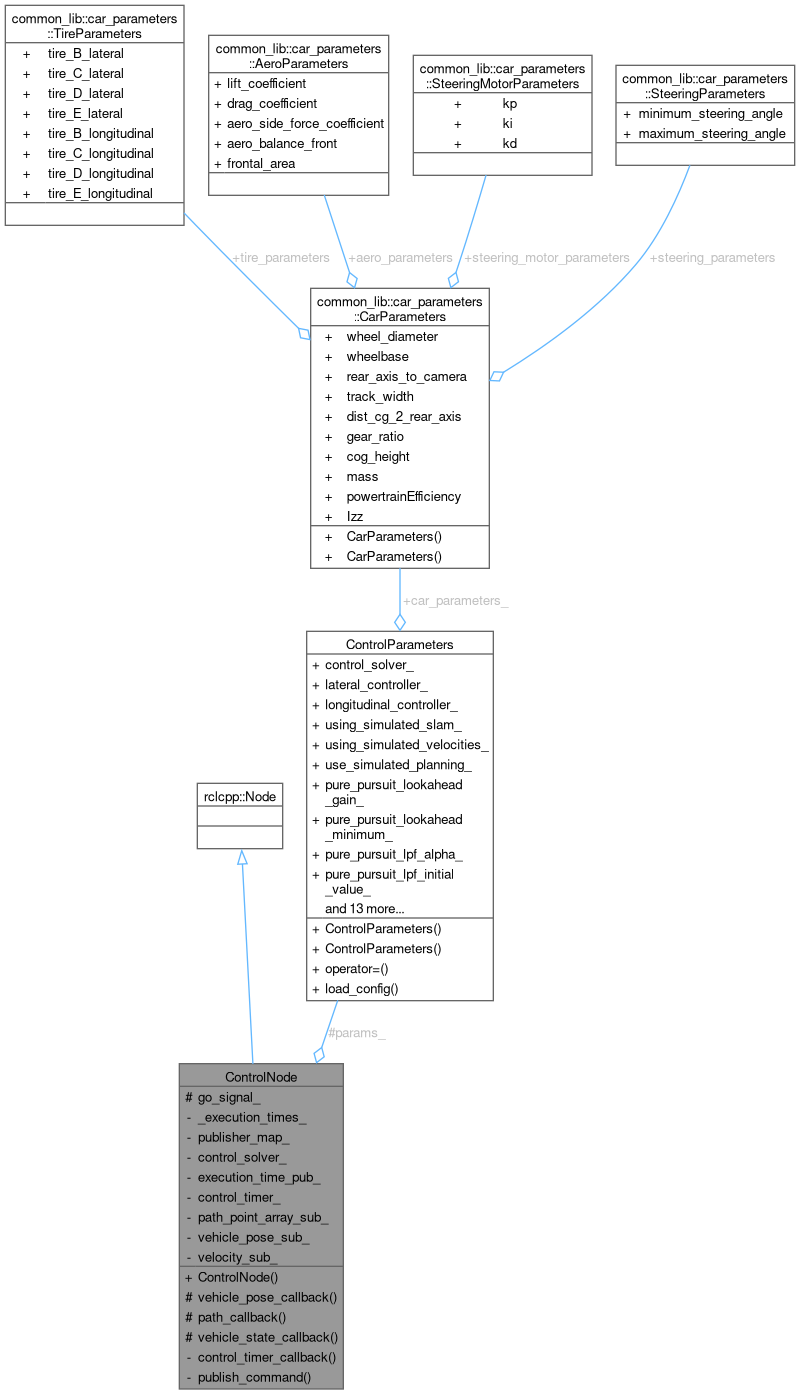
| ControlParameters | params_ |
Private Member Functions | |
| void | control_timer_callback () |
| Function that publishes control commands on timer ticks. | |
| virtual void | publish_command (common_lib::structures::ControlCommand cmd)=0 |
| Adapters override this function to publish control commands in their environment. | |
Private Attributes | |
| std::shared_ptr< std::vector< double > > | _execution_times_ |
| std::map< std::string, std::shared_ptr< rclcpp::PublisherBase > > | publisher_map_ |
| std::shared_ptr< ControlSolver > | control_solver_ |
| rclcpp::Publisher< std_msgs::msg::Float64MultiArray >::SharedPtr | execution_time_pub_ |
| rclcpp::TimerBase::SharedPtr | control_timer_ |
| rclcpp::Subscription< custom_interfaces::msg::PathPointArray >::SharedPtr | path_point_array_sub_ |
| rclcpp::Subscription< custom_interfaces::msg::Pose >::SharedPtr | vehicle_pose_sub_ |
| rclcpp::Subscription< custom_interfaces::msg::Velocities >::SharedPtr | velocity_sub_ |
Detailed Description
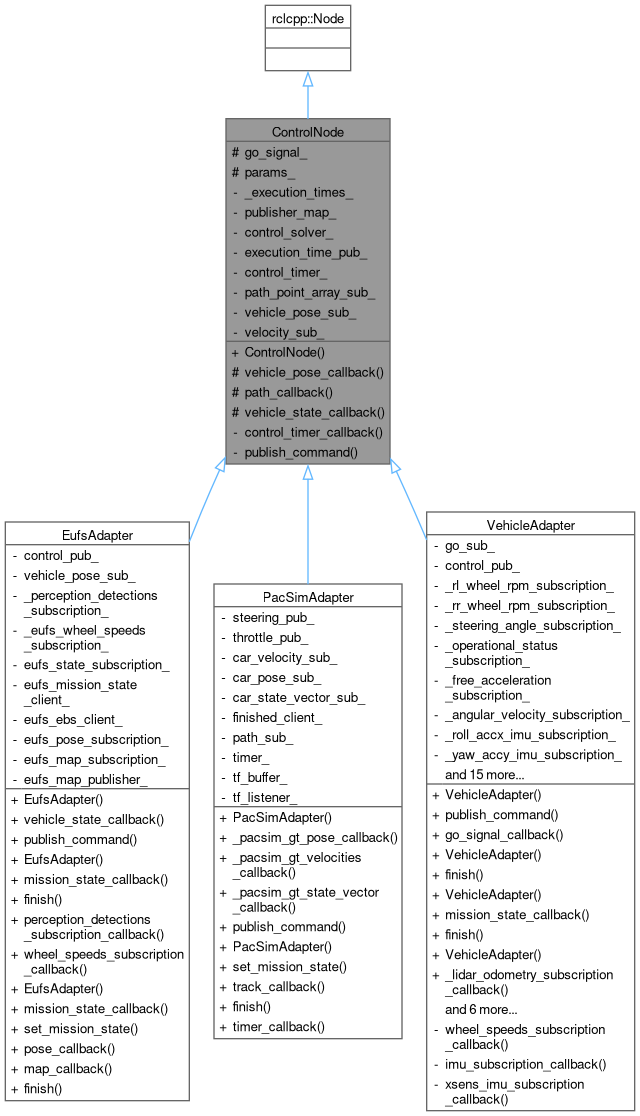
Class responsible for the ROS2 communication of the control module.
This class inherits from rclcpp::Node, subscribing to current state (velocity), pose and path topics, and publishing a control command.
Definition at line 26 of file ros_node.hpp.
Constructor & Destructor Documentation
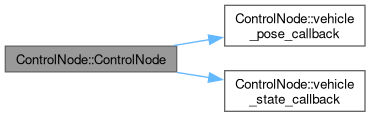
◆ ControlNode()
|
explicit |
Member Function Documentation
◆ control_timer_callback()
|
private |
Function that publishes control commands on timer ticks.
Definition at line 30 of file ros_node.cpp.

◆ path_callback()
|
protected |
Called when a new path is received.
- Parameters
-
msg The received path message
Definition at line 51 of file ros_node.cpp.
◆ publish_command()
|
privatepure virtual |
Adapters override this function to publish control commands in their environment.
- Parameters
-
cmd Control command to be published
Implemented in EufsAdapter, PacSimAdapter, and VehicleAdapter.

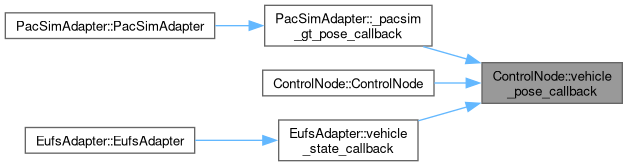
◆ vehicle_pose_callback()
|
protected |
Called when a new vehicle pose is received.
- Parameters
-
msg The received pose message
Definition at line 47 of file ros_node.cpp.
◆ vehicle_state_callback()
|
protected |
Called when a new velocity is received.
- Parameters
-
msg The received velocity message
Definition at line 55 of file ros_node.cpp.

Member Data Documentation
◆ _execution_times_
|
private |
Definition at line 51 of file ros_node.hpp.
◆ control_solver_
|
private |
Definition at line 57 of file ros_node.hpp.
◆ control_timer_
|
private |
Definition at line 63 of file ros_node.hpp.
◆ execution_time_pub_
|
private |
Definition at line 60 of file ros_node.hpp.
◆ go_signal_
|
protected |
Definition at line 28 of file ros_node.hpp.
◆ params_
|
protected |
Definition at line 29 of file ros_node.hpp.
◆ path_point_array_sub_
|
private |
Definition at line 66 of file ros_node.hpp.
◆ publisher_map_
|
private |
Definition at line 54 of file ros_node.hpp.
◆ vehicle_pose_sub_
|
private |
Definition at line 67 of file ros_node.hpp.
◆ velocity_sub_
|
private |
Definition at line 68 of file ros_node.hpp.
The documentation for this class was generated from the following files:
- src/control/include/ros_node/ros_node.hpp
- src/control/src/ros_node/ros_node.cpp