#include <parameters.hpp>
Public Member Functions | |
| ControlParameters (const ControlParameters ¶ms) | |
| ControlParameters ()=default | |
| ControlParameters & | operator= (const ControlParameters &other) |
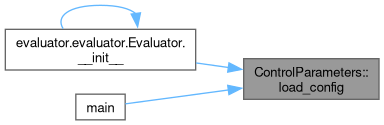
| std::string | load_config () |
Public Attributes | |
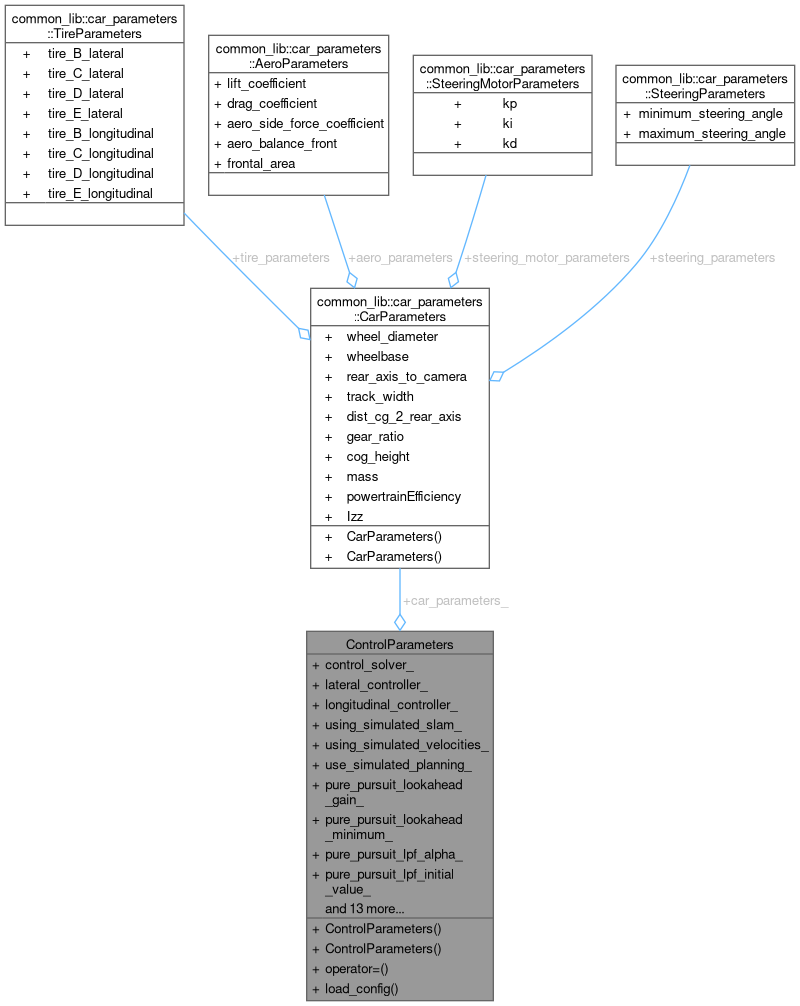
| common_lib::car_parameters::CarParameters | car_parameters_ |
| std::string | control_solver_ |
| std::string | lateral_controller_ |
| std::string | longitudinal_controller_ |
| bool | using_simulated_slam_ |
| bool | using_simulated_velocities_ |
| bool | use_simulated_planning_ |
| double | pure_pursuit_lookahead_gain_ |
| double | pure_pursuit_lookahead_minimum_ |
| double | pure_pursuit_lpf_alpha_ |
| double | pure_pursuit_lpf_initial_value_ |
| double | first_last_max_dist_ |
| double | pid_kp_ |
| double | pid_ki_ |
| double | pid_kd_ |
| double | pid_tau_ |
| double | pid_t_ |
| double | pid_lim_min_ |
| double | pid_lim_max_ |
| double | pid_anti_windup_ |
| double | pid_max_positive_error_ |
| double | pid_max_negative_error_ |
| std::string | map_frame_id_ |
| uint | command_time_interval_ |
Detailed Description
Definition at line 10 of file parameters.hpp.
Constructor & Destructor Documentation
◆ ControlParameters() [1/2]
| ControlParameters::ControlParameters | ( | const ControlParameters & | params | ) |
Definition at line 3 of file parameters.cpp.
◆ ControlParameters() [2/2]
|
default |
Member Function Documentation
◆ load_config()
| std::string ControlParameters::load_config | ( | ) |
Definition at line 60 of file parameters.cpp.

◆ operator=()
| ControlParameters & ControlParameters::operator= | ( | const ControlParameters & | other | ) |
Definition at line 30 of file parameters.cpp.
Member Data Documentation
◆ car_parameters_
| common_lib::car_parameters::CarParameters ControlParameters::car_parameters_ |
Definition at line 11 of file parameters.hpp.
◆ command_time_interval_
| uint ControlParameters::command_time_interval_ |
Definition at line 35 of file parameters.hpp.
◆ control_solver_
| std::string ControlParameters::control_solver_ |
Definition at line 13 of file parameters.hpp.
◆ first_last_max_dist_
| double ControlParameters::first_last_max_dist_ |
Definition at line 23 of file parameters.hpp.
◆ lateral_controller_
| std::string ControlParameters::lateral_controller_ |
Definition at line 14 of file parameters.hpp.
◆ longitudinal_controller_
| std::string ControlParameters::longitudinal_controller_ |
Definition at line 15 of file parameters.hpp.
◆ map_frame_id_
| std::string ControlParameters::map_frame_id_ |
Definition at line 34 of file parameters.hpp.
◆ pid_anti_windup_
| double ControlParameters::pid_anti_windup_ |
Definition at line 31 of file parameters.hpp.
◆ pid_kd_
| double ControlParameters::pid_kd_ |
Definition at line 26 of file parameters.hpp.
◆ pid_ki_
| double ControlParameters::pid_ki_ |
Definition at line 25 of file parameters.hpp.
◆ pid_kp_
| double ControlParameters::pid_kp_ |
Definition at line 24 of file parameters.hpp.
◆ pid_lim_max_
| double ControlParameters::pid_lim_max_ |
Definition at line 30 of file parameters.hpp.
◆ pid_lim_min_
| double ControlParameters::pid_lim_min_ |
Definition at line 29 of file parameters.hpp.
◆ pid_max_negative_error_
| double ControlParameters::pid_max_negative_error_ |
Definition at line 33 of file parameters.hpp.
◆ pid_max_positive_error_
| double ControlParameters::pid_max_positive_error_ |
Definition at line 32 of file parameters.hpp.
◆ pid_t_
| double ControlParameters::pid_t_ |
Definition at line 28 of file parameters.hpp.
◆ pid_tau_
| double ControlParameters::pid_tau_ |
Definition at line 27 of file parameters.hpp.
◆ pure_pursuit_lookahead_gain_
| double ControlParameters::pure_pursuit_lookahead_gain_ |
Definition at line 19 of file parameters.hpp.
◆ pure_pursuit_lookahead_minimum_
| double ControlParameters::pure_pursuit_lookahead_minimum_ |
Definition at line 20 of file parameters.hpp.
◆ pure_pursuit_lpf_alpha_
| double ControlParameters::pure_pursuit_lpf_alpha_ |
Definition at line 21 of file parameters.hpp.
◆ pure_pursuit_lpf_initial_value_
| double ControlParameters::pure_pursuit_lpf_initial_value_ |
Definition at line 22 of file parameters.hpp.
◆ use_simulated_planning_
| bool ControlParameters::use_simulated_planning_ |
Definition at line 18 of file parameters.hpp.
◆ using_simulated_slam_
| bool ControlParameters::using_simulated_slam_ |
Definition at line 16 of file parameters.hpp.
◆ using_simulated_velocities_
| bool ControlParameters::using_simulated_velocities_ |
Definition at line 17 of file parameters.hpp.
The documentation for this struct was generated from the following files:
- src/control/include/config/parameters.hpp
- src/control/src/config/parameters.cpp