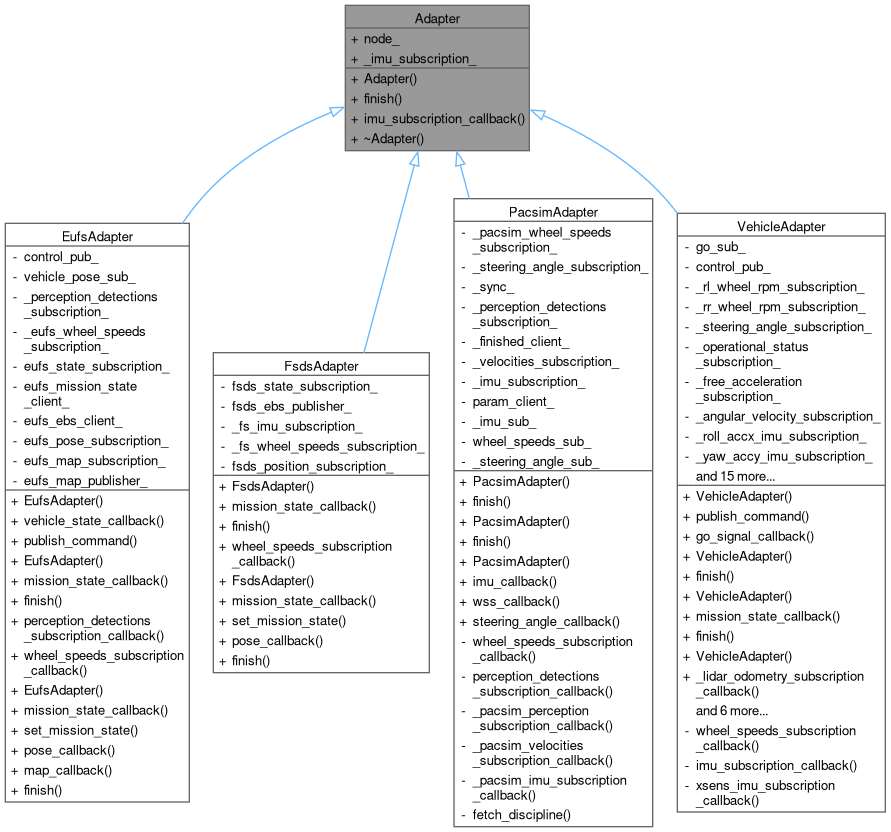
Class that handles the communication between the SpeedEstimation node and the other nodes in the system according to the selected mode. More...
#include <adapter.hpp>
Public Member Functions | |
| Adapter (std::shared_ptr< SENode > se_node) | |
| virtual void | finish ()=0 |
| Function that sends the finish signal to the respective node. | |
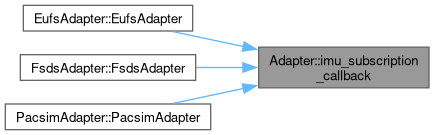
| void | imu_subscription_callback (const sensor_msgs::msg::Imu &msg) |
| Function that parses the message sent from the ros IMU topic and calls the respective node's function to update the motion. | |
| virtual | ~Adapter ()=default |
Public Attributes | |
| std::shared_ptr< SENode > | node_ |
| rclcpp::Subscription< sensor_msgs::msg::Imu >::SharedPtr | _imu_subscription_ |
Detailed Description
Class that handles the communication between the SpeedEstimation node and the other nodes in the system according to the selected mode.
Definition at line 21 of file adapter.hpp.
Constructor & Destructor Documentation
◆ Adapter()
|
explicit |
Definition at line 4 of file adapter.cpp.
◆ ~Adapter()
|
virtualdefault |
Member Function Documentation
◆ finish()
|
pure virtual |
Function that sends the finish signal to the respective node.
Implemented in EufsAdapter, FsdsAdapter, PacsimAdapter, VehicleAdapter, EufsAdapter, FsdsAdapter, VehicleAdapter, PacsimAdapter, and VehicleAdapter.
◆ imu_subscription_callback()
| void Adapter::imu_subscription_callback | ( | const sensor_msgs::msg::Imu & | msg | ) |
Function that parses the message sent from the ros IMU topic and calls the respective node's function to update the motion.
- Parameters
-
msg Message sent from the ros IMU topic
Definition at line 8 of file adapter.cpp.
Member Data Documentation
◆ _imu_subscription_
| rclcpp::Subscription<sensor_msgs::msg::Imu>::SharedPtr Adapter::_imu_subscription_ |
Definition at line 25 of file adapter.hpp.
◆ node_
| std::shared_ptr<SENode> Adapter::node_ |
Definition at line 23 of file adapter.hpp.
The documentation for this class was generated from the following files:
- src/ekf_state_est/include/adapter_ekf_state_est/adapter.hpp
- src/ekf_state_est/src/adapter_ekf_state_est/adapter.cpp