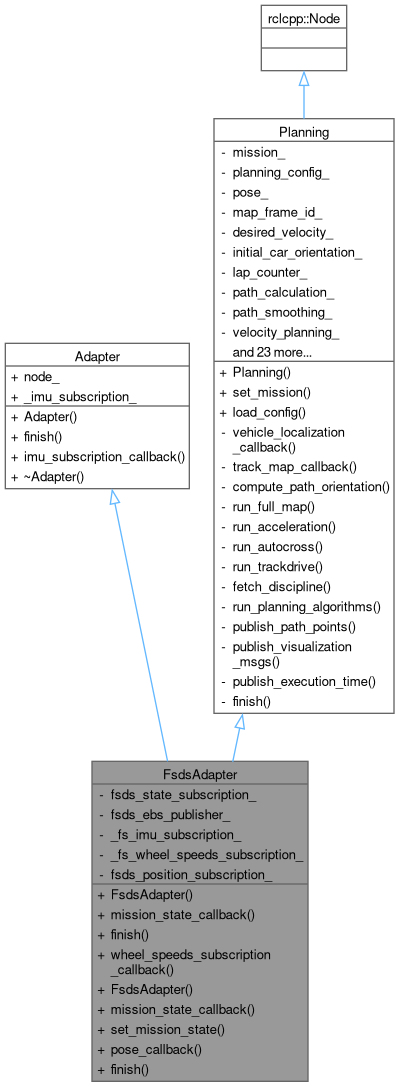
#include <fsds.hpp>
Definition at line 7 of file fsds.hpp.
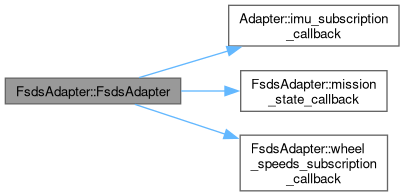
◆ FsdsAdapter() [1/2]
| FsdsAdapter::FsdsAdapter |
( |
std::shared_ptr< SENode > |
se_node | ) |
|
|
explicit |
◆ FsdsAdapter() [2/2]
◆ finish() [1/2]
| void FsdsAdapter::finish |
( |
| ) |
|
|
finalvirtual |
Function that sends the finish signal to the respective node.
Implements Adapter.
Definition at line 29 of file fsds.cpp.
◆ finish() [2/2]
| void FsdsAdapter::finish |
( |
| ) |
|
|
overridevirtual |
Function that sends the finish signal to the respective node.
Implements Adapter.
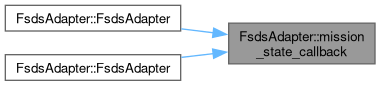
◆ mission_state_callback() [1/2]
| void FsdsAdapter::mission_state_callback |
( |
const fs_msgs::msg::GoSignal & |
msg | ) |
const |
◆ mission_state_callback() [2/2]
| void FsdsAdapter::mission_state_callback |
( |
const fs_msgs::msg::GoSignal |
msg | ) |
|
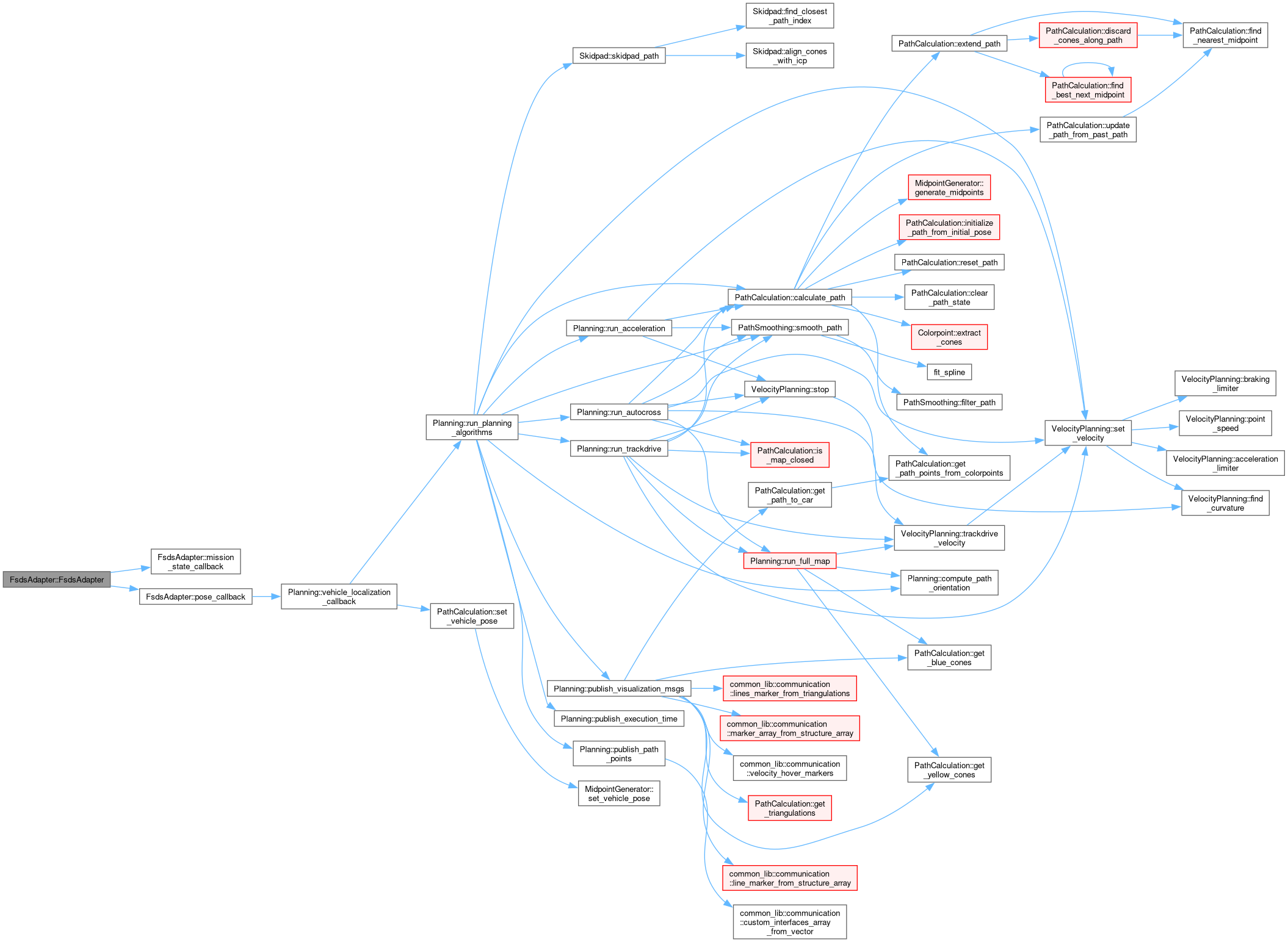
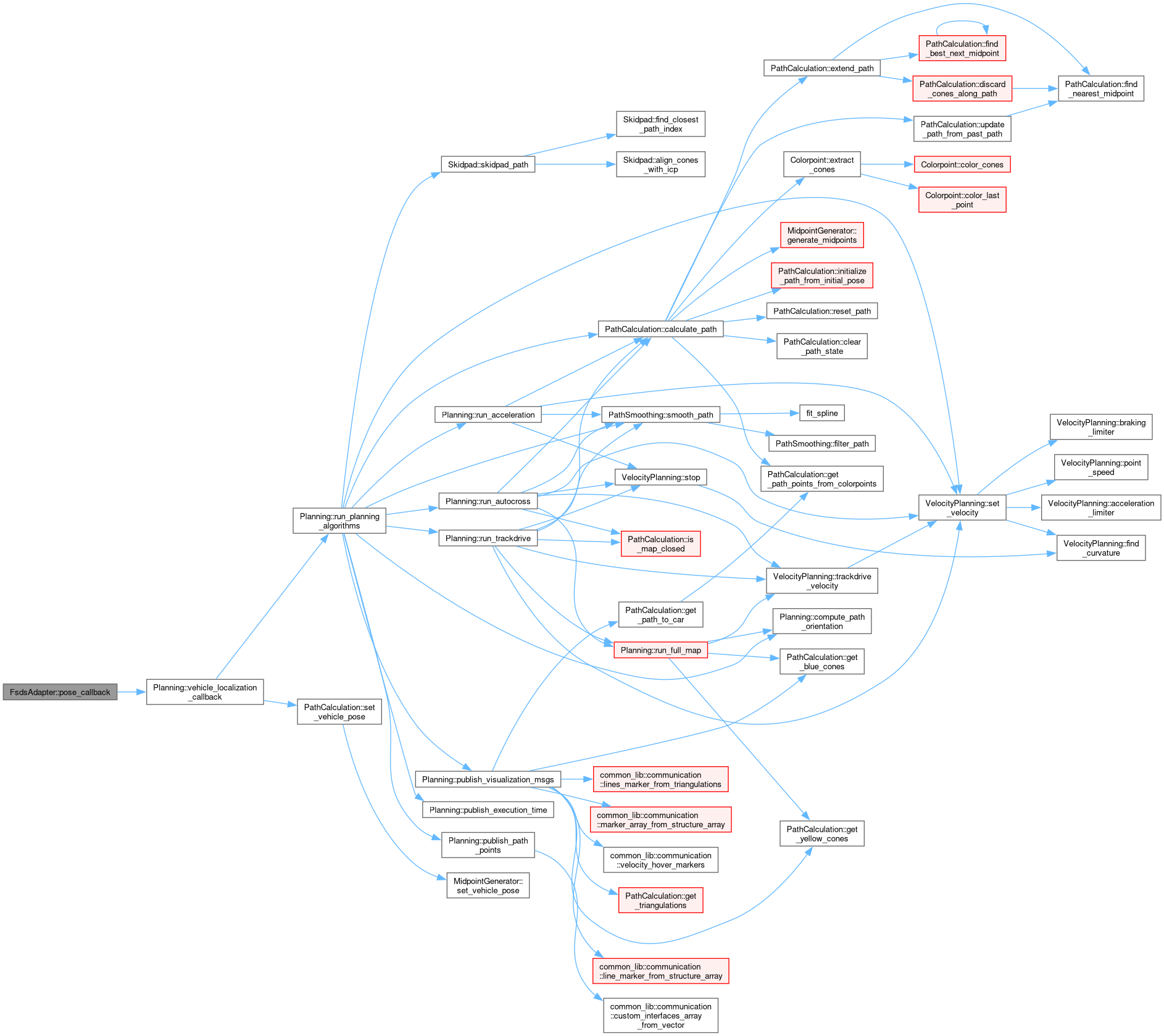
◆ pose_callback()
| void FsdsAdapter::pose_callback |
( |
const nav_msgs::msg::Odometry & |
msg | ) |
|
◆ set_mission_state()
| void FsdsAdapter::set_mission_state |
( |
| ) |
|
◆ wheel_speeds_subscription_callback()
| void FsdsAdapter::wheel_speeds_subscription_callback |
( |
const fs_msgs::msg::WheelStates & |
msg | ) |
const |
◆ _fs_imu_subscription_
| rclcpp::Subscription<sensor_msgs::msg::Imu>::SharedPtr FsdsAdapter::_fs_imu_subscription_ |
|
private |
◆ _fs_wheel_speeds_subscription_
| rclcpp::Subscription<fs_msgs::msg::WheelStates>::SharedPtr FsdsAdapter::_fs_wheel_speeds_subscription_ |
|
private |
◆ fsds_ebs_publisher_
| rclcpp::Publisher< fs_msgs::msg::FinishedSignal >::SharedPtr FsdsAdapter::fsds_ebs_publisher_ |
|
private |
◆ fsds_position_subscription_
| rclcpp::Subscription<nav_msgs::msg::Odometry>::SharedPtr FsdsAdapter::fsds_position_subscription_ |
|
private |
◆ fsds_state_subscription_
| rclcpp::Subscription< fs_msgs::msg::GoSignal >::SharedPtr FsdsAdapter::fsds_state_subscription_ |
|
private |
The documentation for this class was generated from the following files:
- src/ekf_state_est/include/adapter_ekf_state_est/fsds.hpp
- src/planning/include/adapter_planning/fsds.hpp
- src/ekf_state_est/src/adapter_ekf_state_est/fsds.cpp
- src/planning/src/adapter_planning/fsds.cpp
 Public Member Functions inherited from Adapter
Public Member Functions inherited from Adapter