Loading...
Searching...
No Matches
config_loader.cpp File Reference
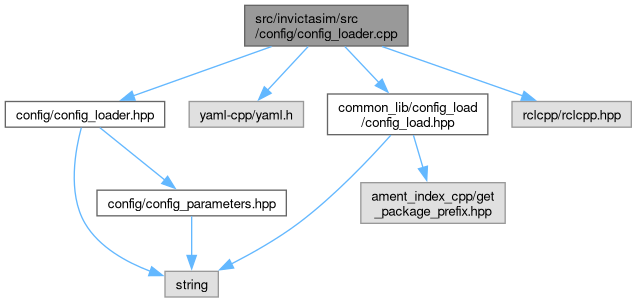
#include "config/config_loader.hpp"#include <yaml-cpp/yaml.h>#include "common_lib/config_load/config_load.hpp"#include "rclcpp/rclcpp.hpp"
Include dependency graph for config_loader.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | invictasim |
Functions | |
| InvictaSimParameters | invictasim::load_config () |
| Load invictasim configuration from YAML files. | |