Loading...
Searching...
No Matches
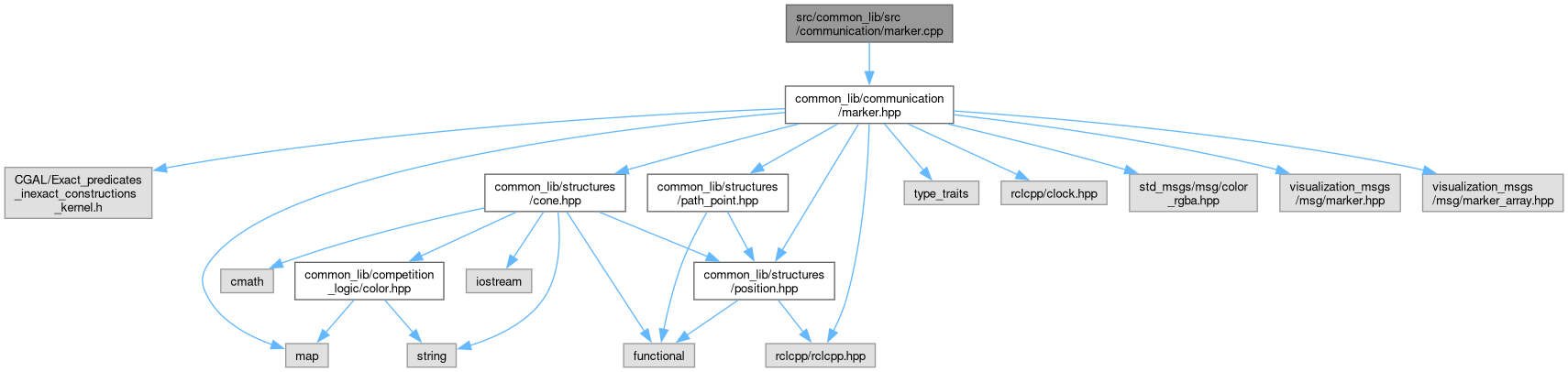
marker.cpp File Reference
#include "common_lib/communication/marker.hpp"
Include dependency graph for marker.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | common_lib |
| namespace | common_lib::communication |
Functions | |
| visualization_msgs::msg::Marker | common_lib::communication::marker_from_position (const common_lib::structures::Position &position, const std::string &name_space, const int id, const std::string &color="red", float scale=0.5, const std::string &frame_id="map", const std::string &shape="sphere", int action=visualization_msgs::msg::Marker::ADD) |
| Converts a position to a marker. | |
| visualization_msgs::msg::Marker | common_lib::communication::lines_marker_from_triangulations (const std::vector< std::pair< Point, Point > > &triangulations, const std::string &name_space, const std::string &frame_id, int id, const std::string &color, float scale, int action) |
| Converts a vector of triangulation edges to a marker. | |
| visualization_msgs::msg::MarkerArray | common_lib::communication::velocity_hover_markers (const std::vector< common_lib::structures::PathPoint > &path_array, const std::string &name_space, const std::string &frame_id, float scale=0.2f, int every_nth=1) |
| Creates sphere markers at each path point with velocity in the marker namespace When you hover over these in Foxglove's 3D panel, it shows the velocity in the tooltip. | |