Loading...
Searching...
No Matches
Classes | |
| struct | HasPosition |
| A helper struct to check if a type T has a member named 'position'. More... | |
| struct | HasPosition< T, std::enable_if_t< std::is_arithmetic_v< decltype(std::declval< T >().position.x)> &&std::is_arithmetic_v< decltype(std::declval< T >().position.y)> > > |
| A specialization of the has_position struct for types T that do have a valid 'position' member. More... | |
Functions | |
| std::vector< common_lib::structures::PathPoint > | path_point_array_from_ci_vector (const custom_interfaces::msg::PathPointArray &path_point_array) |
| Convert from custom interfaces PathPointArray to vector of common_lib PathPoints. | |
| custom_interfaces::msg::ConeArray | custom_interfaces_array_from_vector (const std::vector< common_lib::structures::Cone > &input_cones) |
| custom_interfaces::msg::PathPointArray | custom_interfaces_array_from_vector (const std::vector< common_lib::structures::PathPoint > &input_path, bool is_map_closed) |
| std::vector< common_lib::structures::Cone > | cone_vector_from_custom_interfaces (const custom_interfaces::msg::ConeArray &msg) |
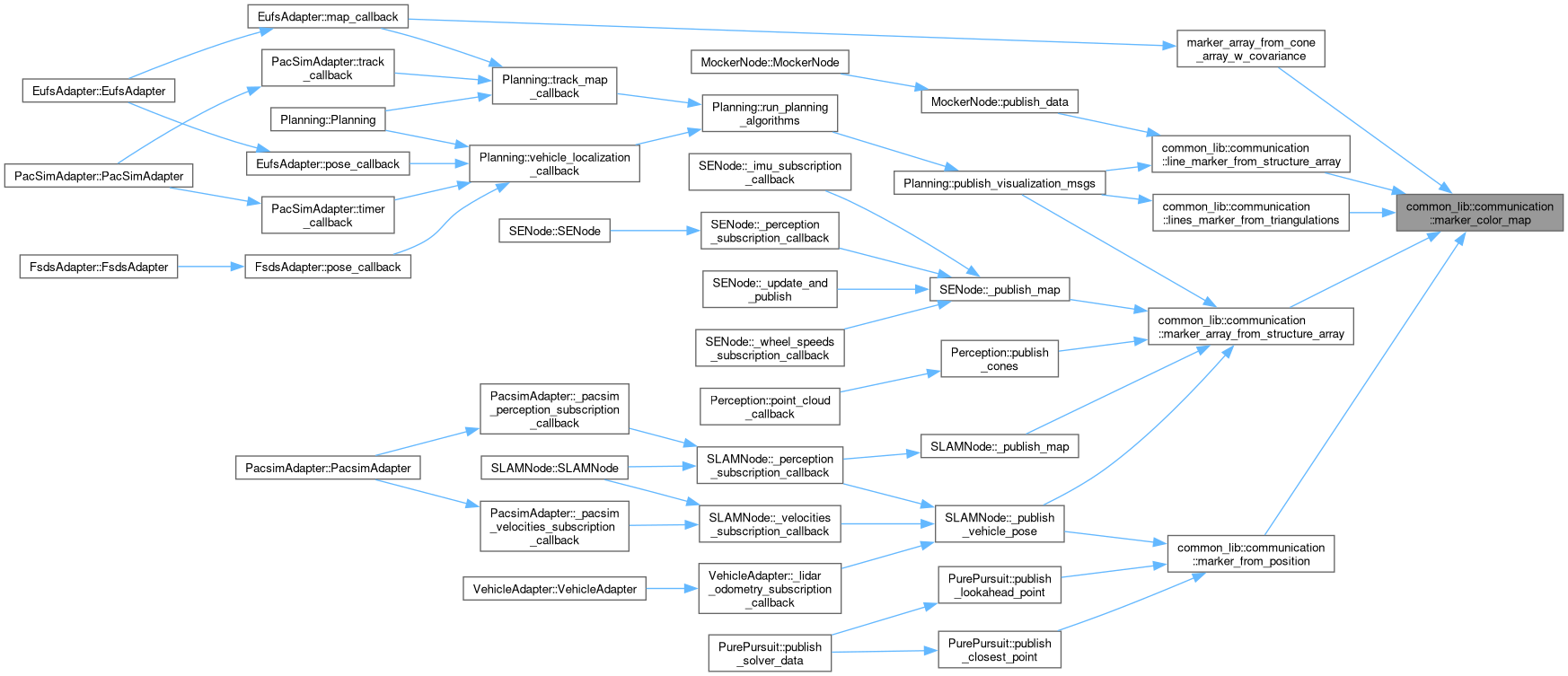
| const std::map< std::string, std::array< float, 4 >, std::less<> > & | marker_color_map () |
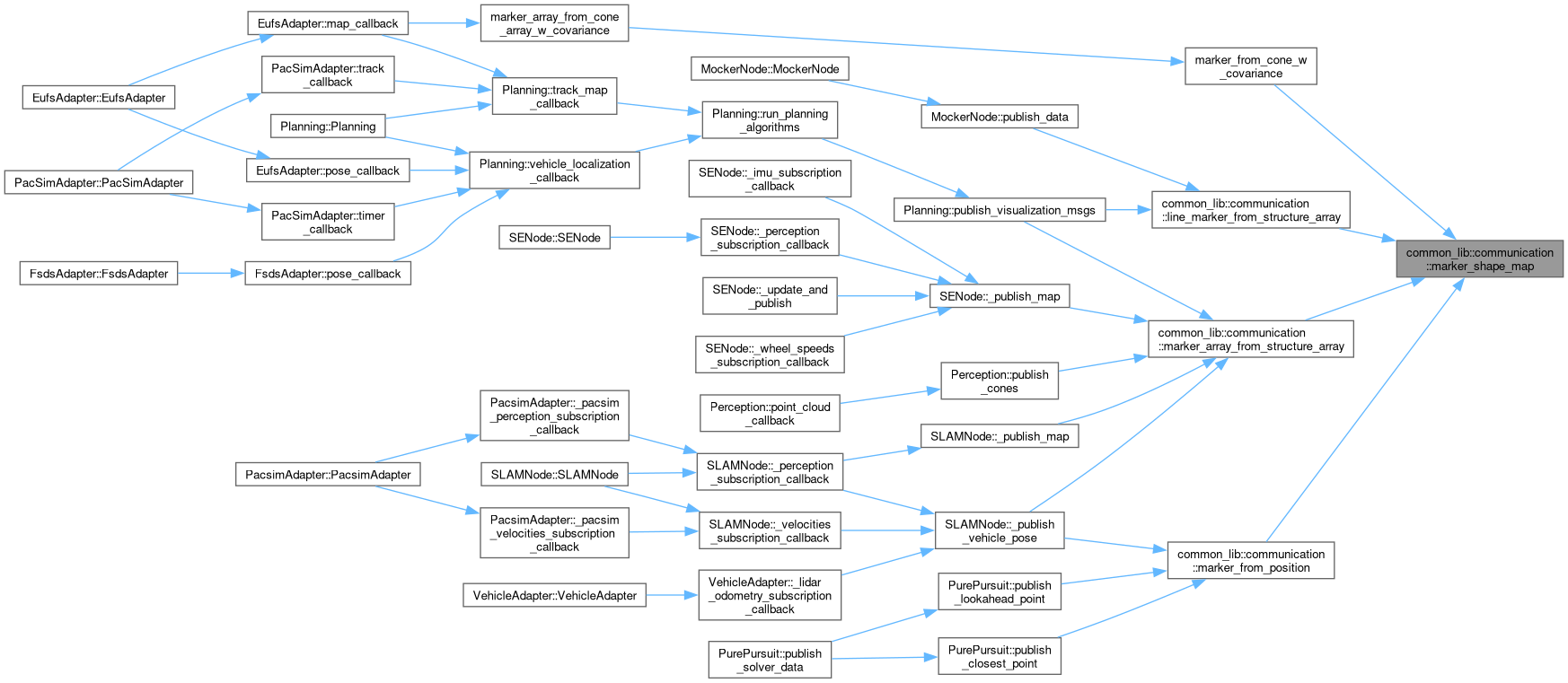
| const std::map< std::string, int, std::less<> > & | marker_shape_map () |
| template<typename T > | |
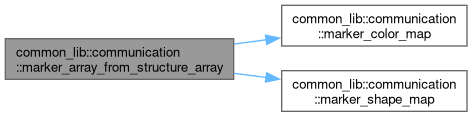
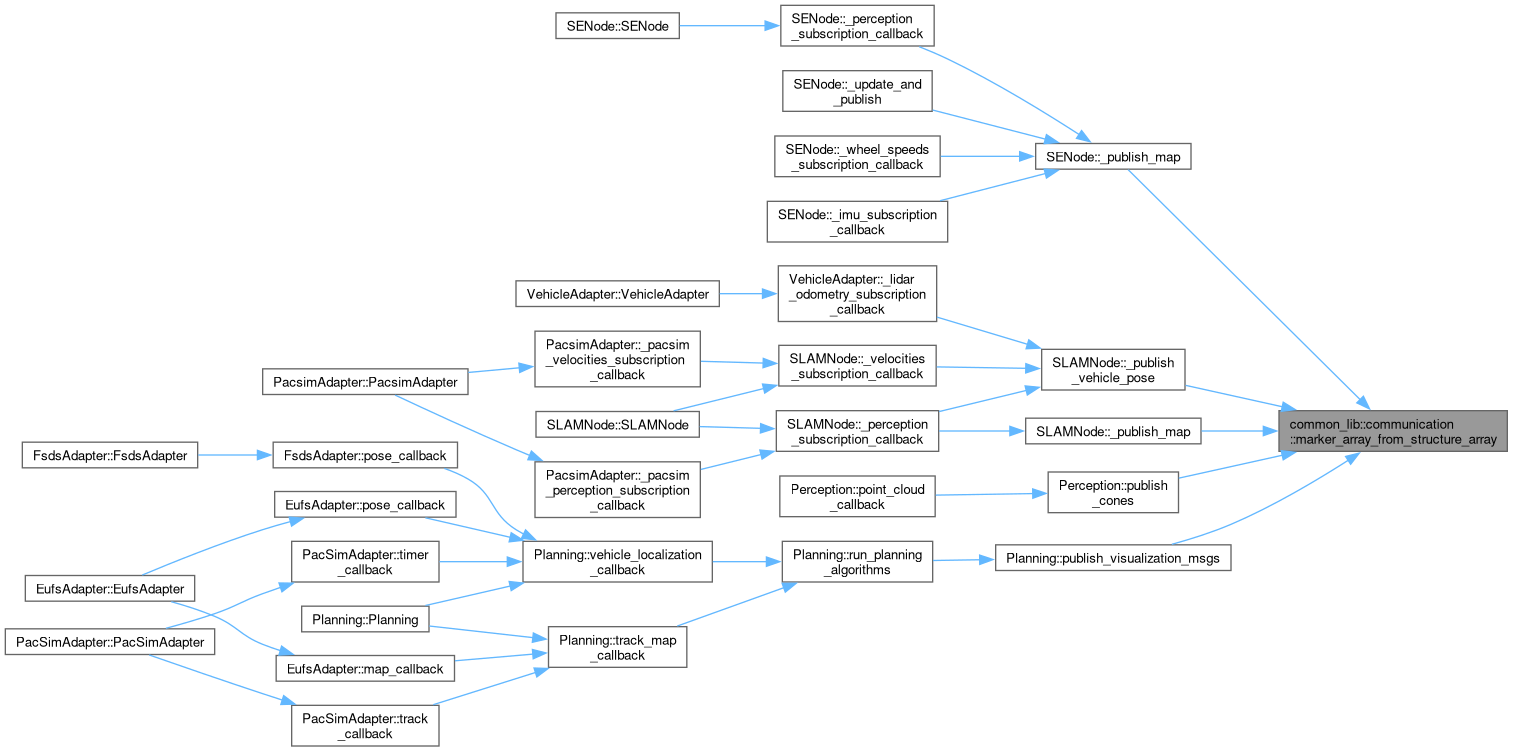
| visualization_msgs::msg::MarkerArray | marker_array_from_structure_array (const std::vector< T > &structure_array, const std::string &name_space, const std::string &frame_id, const std::string &color="red", const std::string &shape="cylinder", float scale=0.5, int action=visualization_msgs::msg::Marker::MODIFY) |
| Converts a vector of cones to a marker array. | |
| template<typename T > | |
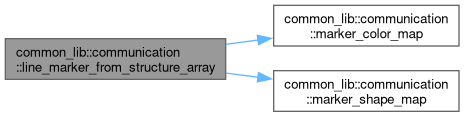
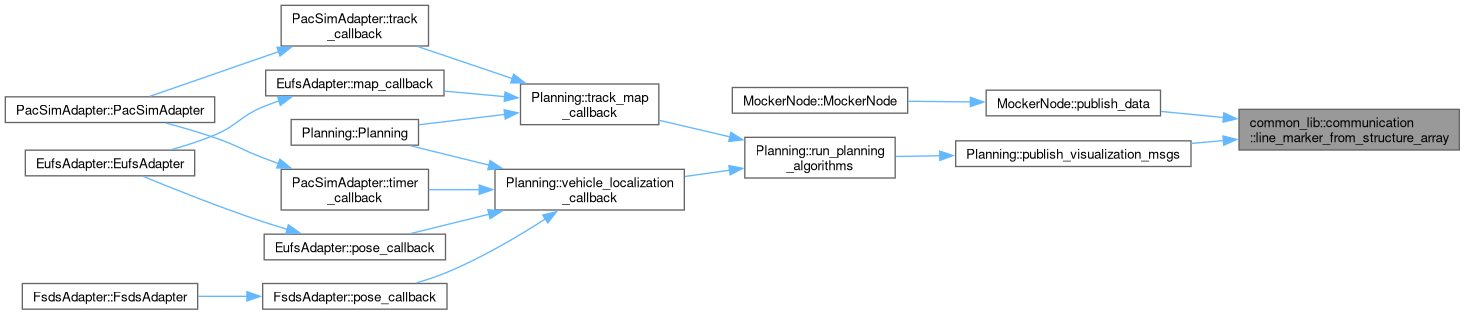
| visualization_msgs::msg::Marker | line_marker_from_structure_array (const std::vector< T > &structure_array, const std::string &name_space, const std::string &frame_id, const int id, const std::string &color="red", const std::string &shape="line", float scale=0.1f, int action=visualization_msgs::msg::Marker::MODIFY) |
| Converts a vector of cones to a marker array. | |
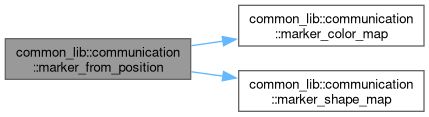
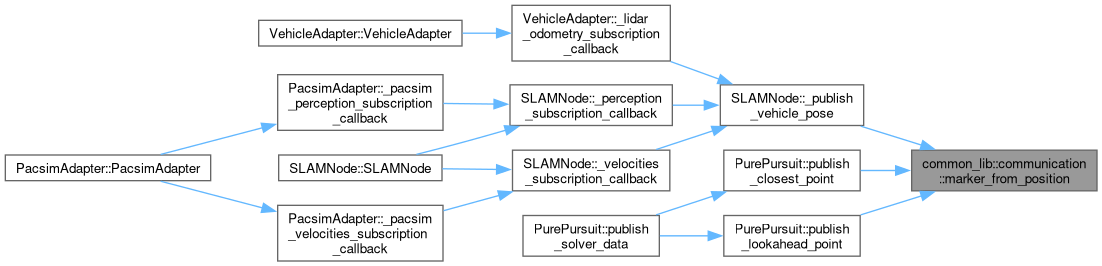
| visualization_msgs::msg::Marker | marker_from_position (const common_lib::structures::Position &position, const std::string &name_space, const int id, const std::string &color="red", float scale=0.5, const std::string &frame_id="map", const std::string &shape="sphere", int action=visualization_msgs::msg::Marker::ADD) |
| Converts a position to a marker. | |
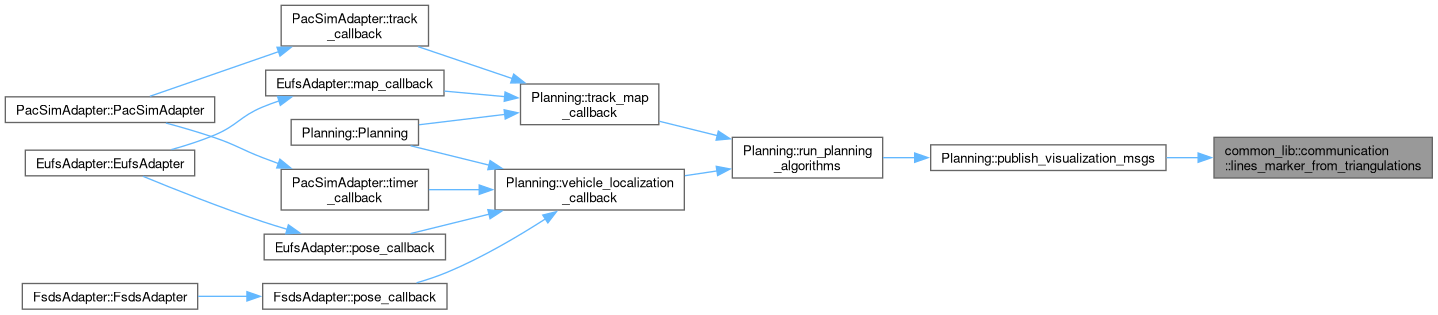
| visualization_msgs::msg::Marker | lines_marker_from_triangulations (const std::vector< std::pair< Point, Point > > &triangulations, const std::string &name_space, const std::string &frame_id, int id, const std::string &color, float scale, int action) |
| Converts a vector of triangulation edges to a marker. | |
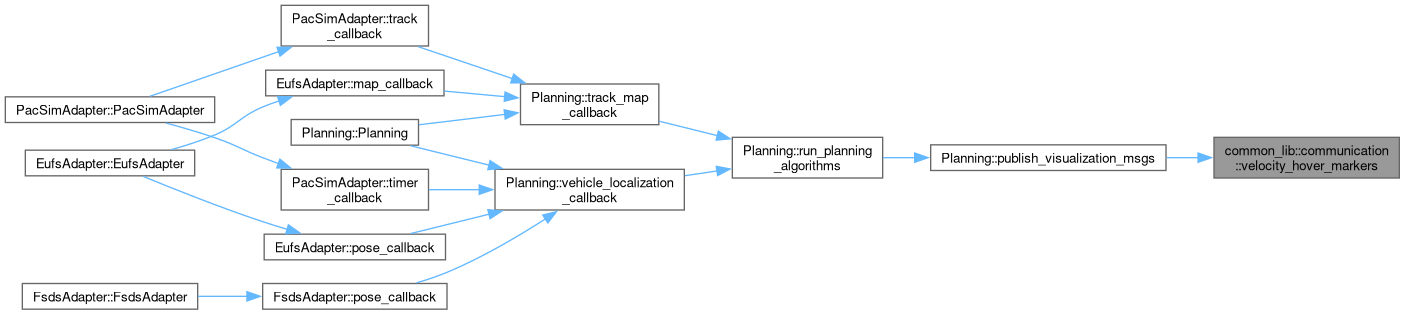
| visualization_msgs::msg::MarkerArray | velocity_hover_markers (const std::vector< common_lib::structures::PathPoint > &path_array, const std::string &name_space, const std::string &frame_id, float scale=0.2f, int every_nth=1) |
| Creates sphere markers at each path point with velocity in the marker namespace When you hover over these in Foxglove's 3D panel, it shows the velocity in the tooltip. | |
Function Documentation
◆ cone_vector_from_custom_interfaces()
| std::vector< common_lib::structures::Cone > common_lib::communication::cone_vector_from_custom_interfaces | ( | const custom_interfaces::msg::ConeArray & | msg | ) |

◆ custom_interfaces_array_from_vector() [1/2]
| custom_interfaces::msg::ConeArray common_lib::communication::custom_interfaces_array_from_vector | ( | const std::vector< common_lib::structures::Cone > & | input_cones | ) |
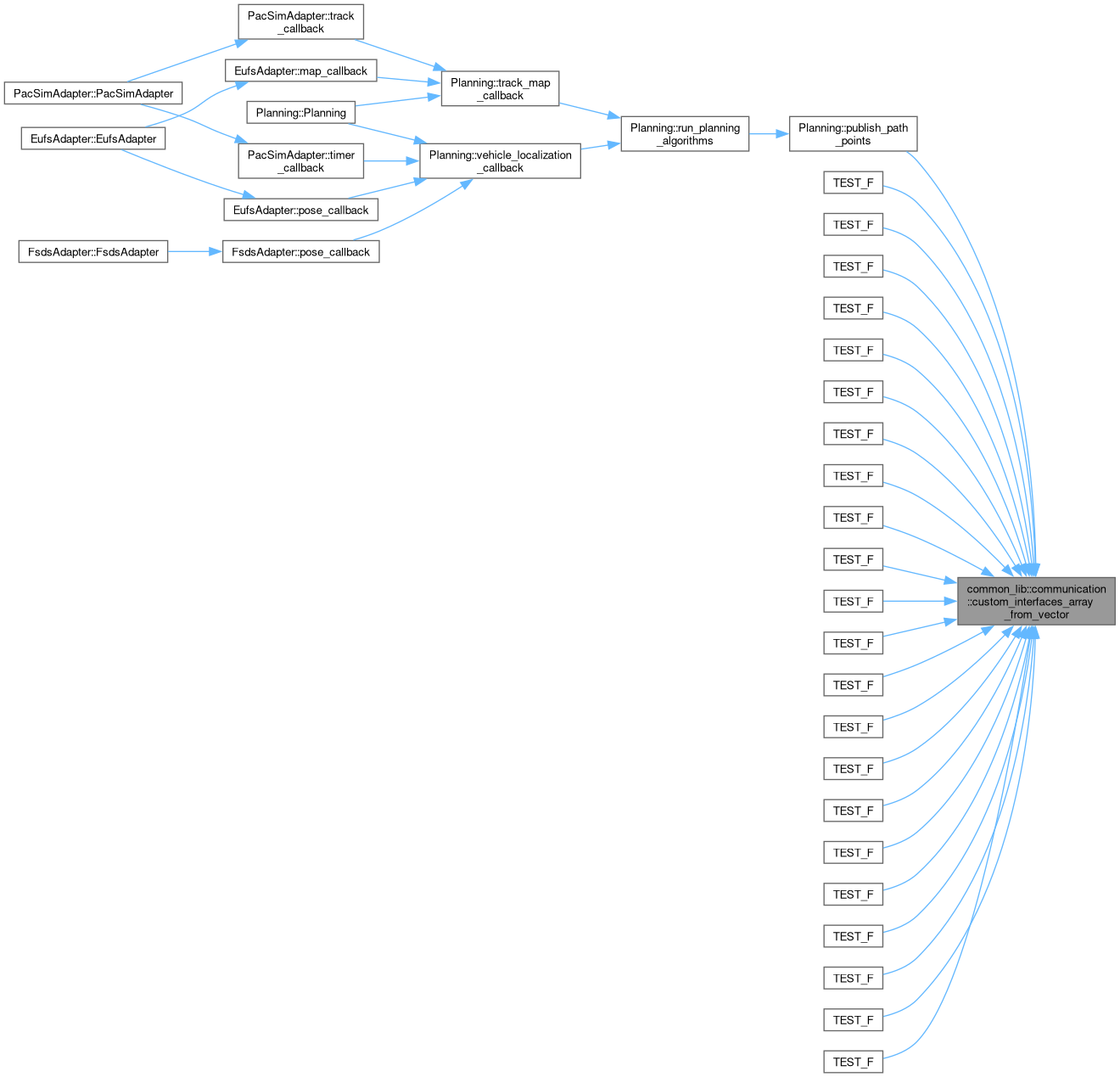
◆ custom_interfaces_array_from_vector() [2/2]
| custom_interfaces::msg::PathPointArray common_lib::communication::custom_interfaces_array_from_vector | ( | const std::vector< common_lib::structures::PathPoint > & | input_path, |
| bool | is_map_closed | ||
| ) |
Definition at line 29 of file interfaces.cpp.
◆ line_marker_from_structure_array()
template<typename T >
| visualization_msgs::msg::Marker common_lib::communication::line_marker_from_structure_array | ( | const std::vector< T > & | structure_array, |
| const std::string & | name_space, | ||
| const std::string & | frame_id, | ||
| const int | id, | ||
| const std::string & | color = "red", |
||
| const std::string & | shape = "line", |
||
| float | scale = 0.1f, |
||
| int | action = visualization_msgs::msg::Marker::MODIFY |
||
| ) |
Converts a vector of cones to a marker array.
- Parameters
-
cone_array vector of cones color color of the marker (blue, yellow, orange, red, green) shape shape of the marker (cylinder, cube, sphere) frame_id frame id of the marker, for transforms name_space namespace of the marker, used in conjunction with ID to identify marker scale scale of the marker, default is 0.5 action action of the marker, default is ADD/MODIFY
- Returns
- visualization_msgs::msg::MarkerArray
Definition at line 158 of file marker.hpp.
Here is the call graph for this function:
Here is the caller graph for this function:
◆ lines_marker_from_triangulations()
| visualization_msgs::msg::Marker common_lib::communication::lines_marker_from_triangulations | ( | const std::vector< std::pair< Point, Point > > & | triangulations, |
| const std::string & | name_space, | ||
| const std::string & | frame_id, | ||
| int | id, | ||
| const std::string & | color, | ||
| float | scale, | ||
| int | action | ||
| ) |
Converts a vector of triangulation edges to a marker.
- Parameters
-
triangulations Vector of edges, where each edge is a pair of Points name_space Namespace of the marker, used in conjunction with ID to identify the marker frame_id Frame id of the marker id Id of the marker color Color of the marker scale Thickness of the lines action action of the marker
- Returns
- visualization_msgs::msg::Marker
Definition at line 41 of file marker.cpp.
Here is the call graph for this function:

Here is the caller graph for this function:
◆ marker_array_from_structure_array()
template<typename T >
| visualization_msgs::msg::MarkerArray common_lib::communication::marker_array_from_structure_array | ( | const std::vector< T > & | structure_array, |
| const std::string & | name_space, | ||
| const std::string & | frame_id, | ||
| const std::string & | color = "red", |
||
| const std::string & | shape = "cylinder", |
||
| float | scale = 0.5, |
||
| int | action = visualization_msgs::msg::Marker::MODIFY |
||
| ) |
Converts a vector of cones to a marker array.
- Parameters
-
cone_array vector of cones color color of the marker (blue, yellow, orange, red, green) shape shape of the marker (cylinder, cube, sphere) frame_id frame id of the marker, for transforms name_space namespace of the marker, used in conjunction with ID to identify marker scale scale of the marker, default is 0.5 action action of the marker, default is ADD/MODIFY
- Returns
- visualization_msgs::msg::MarkerArray
Definition at line 79 of file marker.hpp.
Here is the call graph for this function:
Here is the caller graph for this function:
◆ marker_color_map()
|
inline |
◆ marker_from_position()
| visualization_msgs::msg::Marker common_lib::communication::marker_from_position | ( | const common_lib::structures::Position & | position, |
| const std::string & | name_space, | ||
| const int | id, | ||
| const std::string & | color = "red", |
||
| float | scale = 0.5, |
||
| const std::string & | frame_id = "map", |
||
| const std::string & | shape = "sphere", |
||
| int | action = visualization_msgs::msg::Marker::ADD |
||
| ) |
Converts a position to a marker.
- Parameters
-
position position to convert name_space namespace of the marker, used in conjunction with ID to identify marker id id of the marker color color of the marker (blue, yellow, orange, red, green) scale scale of the marker, default is 0.5 frame_id frame id of the marker, for transforms shape shape of the marker (cylinder, cube, sphere) action action of the marker, default is ADD/MODIFY
- Returns
- visualization_msgs::msg::Marker
Definition at line 5 of file marker.cpp.
Here is the call graph for this function:
Here is the caller graph for this function:
◆ marker_shape_map()
|
inline |
◆ path_point_array_from_ci_vector()
| std::vector< common_lib::structures::PathPoint > common_lib::communication::path_point_array_from_ci_vector | ( | const custom_interfaces::msg::PathPointArray & | path_point_array | ) |
Convert from custom interfaces PathPointArray to vector of common_lib PathPoints.
- Parameters
-
path_point_array
- Returns
- std::vector<common_lib::structures::PathPoint>
Definition at line 5 of file interfaces.cpp.
Here is the caller graph for this function:

◆ velocity_hover_markers()
| visualization_msgs::msg::MarkerArray common_lib::communication::velocity_hover_markers | ( | const std::vector< common_lib::structures::PathPoint > & | path_array, |
| const std::string & | name_space, | ||
| const std::string & | frame_id, | ||
| float | scale = 0.2f, |
||
| int | every_nth = 1 |
||
| ) |
Creates sphere markers at each path point with velocity in the marker namespace When you hover over these in Foxglove's 3D panel, it shows the velocity in the tooltip.
- Parameters
-
path_array vector of PathPoints name_space base namespace of the markers frame_id frame id scale size of the spheres every_nth show sphere every nth point
- Returns
- visualization_msgs::msg::MarkerArray
Definition at line 79 of file marker.cpp.
Here is the caller graph for this function: