Loading...
Searching...
No Matches
evaluator.adapter.Adapter Class Reference
Class for subscribing to a point cloud topic and synchronizing messages with a ROS2 node. More...
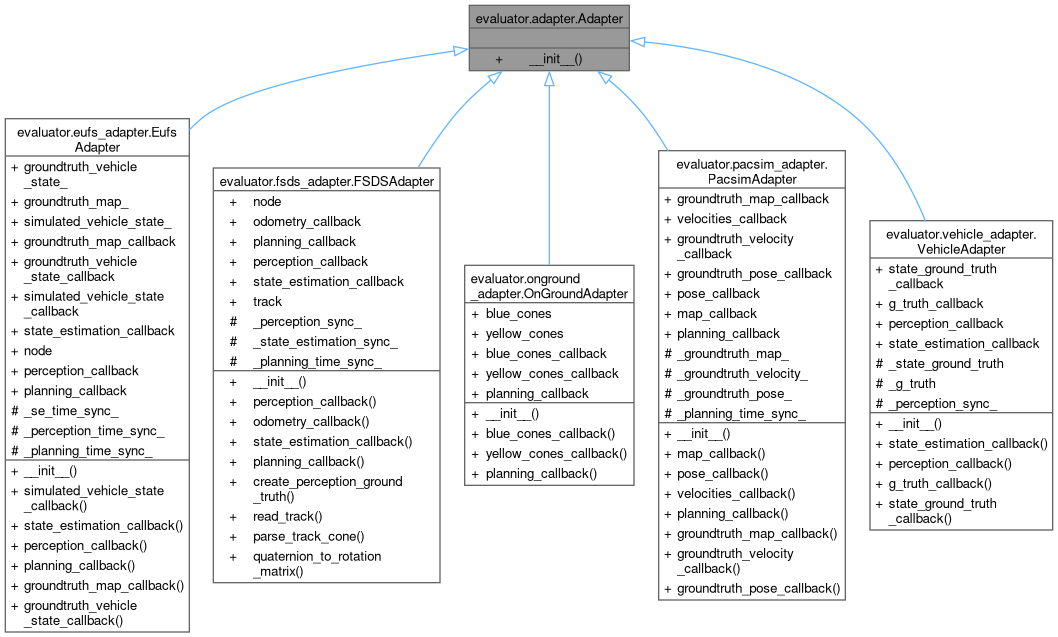
Inheritance diagram for evaluator.adapter.Adapter:
Collaboration diagram for evaluator.adapter.Adapter:
Public Member Functions | |
| __init__ (self, rclpy.node.Node node) | |
| Initializes the Adapter. | |
Detailed Description
Class for subscribing to a point cloud topic and synchronizing messages with a ROS2 node.
Definition at line 7 of file adapter.py.
Constructor & Destructor Documentation
◆ __init__()
| evaluator.adapter.Adapter.__init__ | ( | self, | |
| rclpy.node.Node | node | ||
| ) |
Initializes the Adapter.
Args: node (Node): ROS2 node instance. point_cloud_topic (str): Topic for point cloud data.
Reimplemented in evaluator.eufs_adapter.EufsAdapter, evaluator.fsds_adapter.FSDSAdapter, evaluator.onground_adapter.OnGroundAdapter, evaluator.pacsim_adapter.PacsimAdapter, and evaluator.vehicle_adapter.VehicleAdapter.
Definition at line 12 of file adapter.py.
The documentation for this class was generated from the following file:
- src/evaluator/evaluator/adapter.py