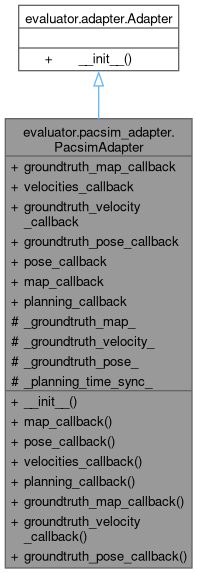
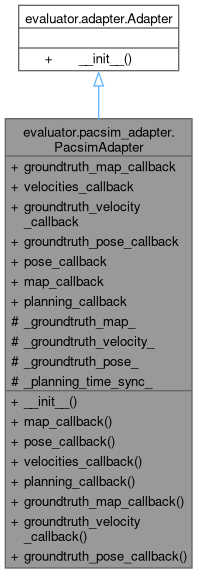
Adapter class to manage the use of Pacsim. More...
Public Member Functions | |
| __init__ (self, rclpy.node.Node node) | |
| Initializes the PacSim Adapter. | |
| map_callback (self, ConeArray map) | |
| Callback function to process map messages. | |
| pose_callback (self, Pose vehicle_pose) | |
| Callback function to process vehicle pose messages. | |
| velocities_callback (self, Velocities velocities) | |
| Callback function to process synchronized messages and compute state estimation metrics. | |
| planning_callback (self, PathPointArray planning_output, PathPointArray path_ground_truth) | |
| Callback function to process synchronized messages and compute planning metrics. | |
| groundtruth_map_callback (self, MarkerArray groundtruth_map) | |
| Callback function to process ground truth map messages. | |
| groundtruth_velocity_callback (self, TwistWithCovarianceStamped groundtruth_velocity) | |
| Callback function to process ground truth velocity messages. | |
| groundtruth_pose_callback (self, TwistWithCovarianceStamped groundtruth_pose) | |
| Callback function to process ground truth pose messages. | |
Public Attributes | |
| groundtruth_map_callback | |
| velocities_callback | |
| groundtruth_velocity_callback | |
| groundtruth_pose_callback | |
| pose_callback | |
| map_callback | |
| planning_callback | |
Protected Attributes | |
| _groundtruth_map_ | |
| _groundtruth_velocity_ | |
| _groundtruth_pose_ | |
| _planning_time_sync_ | |
Detailed Description
Adapter class to manage the use of Pacsim.
Definition at line 22 of file pacsim_adapter.py.
Constructor & Destructor Documentation
◆ __init__()
| evaluator.pacsim_adapter.PacsimAdapter.__init__ | ( | self, | |
| rclpy.node.Node | node | ||
| ) |
Initializes the PacSim Adapter.
Args: node (Node): ROS2 node instance.
Reimplemented from evaluator.adapter.Adapter.
Definition at line 27 of file pacsim_adapter.py.
Member Function Documentation
◆ groundtruth_map_callback()
| evaluator.pacsim_adapter.PacsimAdapter.groundtruth_map_callback | ( | self, | |
| MarkerArray | groundtruth_map | ||
| ) |
Callback function to process ground truth map messages.
It also marks the planning's initial timestamp
Args: groundtruth_map (MarkerArray): Ground truth map data.
Definition at line 187 of file pacsim_adapter.py.
◆ groundtruth_pose_callback()
| evaluator.pacsim_adapter.PacsimAdapter.groundtruth_pose_callback | ( | self, | |
| TwistWithCovarianceStamped | groundtruth_pose | ||
| ) |
Callback function to process ground truth pose messages.
Args: groundtruth_pose (TwistWithCovarianceStamped): Ground truth pose data.
Definition at line 213 of file pacsim_adapter.py.
◆ groundtruth_velocity_callback()
| evaluator.pacsim_adapter.PacsimAdapter.groundtruth_velocity_callback | ( | self, | |
| TwistWithCovarianceStamped | groundtruth_velocity | ||
| ) |
Callback function to process ground truth velocity messages.
Args: groundtruth_velocity (TwistWithCovarianceStamped): Ground truth velocity data.
Definition at line 197 of file pacsim_adapter.py.
◆ map_callback()
| evaluator.pacsim_adapter.PacsimAdapter.map_callback | ( | self, | |
| ConeArray | map | ||
| ) |
Callback function to process map messages.
Args: map (ConeArray): Map data.
Definition at line 90 of file pacsim_adapter.py.
◆ planning_callback()
| evaluator.pacsim_adapter.PacsimAdapter.planning_callback | ( | self, | |
| PathPointArray | planning_output, | ||
| PathPointArray | path_ground_truth | ||
| ) |
Callback function to process synchronized messages and compute planning metrics.
Args: planning_output (PathPointArray): Planning output. path_ground_truth (PathPointArray): Groundtruth path message.
Definition at line 154 of file pacsim_adapter.py.
◆ pose_callback()
| evaluator.pacsim_adapter.PacsimAdapter.pose_callback | ( | self, | |
| Pose | vehicle_pose | ||
| ) |
Callback function to process vehicle pose messages.
Args: vehicle_pose (Pose): Vehicle pose data.
Definition at line 109 of file pacsim_adapter.py.
◆ velocities_callback()
| evaluator.pacsim_adapter.PacsimAdapter.velocities_callback | ( | self, | |
| Velocities | velocities | ||
| ) |
Callback function to process synchronized messages and compute state estimation metrics.
Args: velocities (Velocities): Vehicle velocities estimation data.
Definition at line 129 of file pacsim_adapter.py.
Member Data Documentation
◆ _groundtruth_map_
|
protected |
Definition at line 35 of file pacsim_adapter.py.
◆ _groundtruth_pose_
|
protected |
Definition at line 58 of file pacsim_adapter.py.
◆ _groundtruth_velocity_
|
protected |
Definition at line 50 of file pacsim_adapter.py.
◆ _planning_time_sync_
|
protected |
Definition at line 79 of file pacsim_adapter.py.
◆ groundtruth_map_callback
| evaluator.pacsim_adapter.PacsimAdapter.groundtruth_map_callback |
Definition at line 39 of file pacsim_adapter.py.
◆ groundtruth_pose_callback
| evaluator.pacsim_adapter.PacsimAdapter.groundtruth_pose_callback |
Definition at line 62 of file pacsim_adapter.py.
◆ groundtruth_velocity_callback
| evaluator.pacsim_adapter.PacsimAdapter.groundtruth_velocity_callback |
Definition at line 54 of file pacsim_adapter.py.
◆ map_callback
| evaluator.pacsim_adapter.PacsimAdapter.map_callback |
Definition at line 75 of file pacsim_adapter.py.
◆ planning_callback
| evaluator.pacsim_adapter.PacsimAdapter.planning_callback |
Definition at line 88 of file pacsim_adapter.py.
◆ pose_callback
| evaluator.pacsim_adapter.PacsimAdapter.pose_callback |
Definition at line 74 of file pacsim_adapter.py.
◆ velocities_callback
| evaluator.pacsim_adapter.PacsimAdapter.velocities_callback |
Definition at line 46 of file pacsim_adapter.py.
The documentation for this class was generated from the following file:
- src/evaluator/evaluator/pacsim_adapter.py