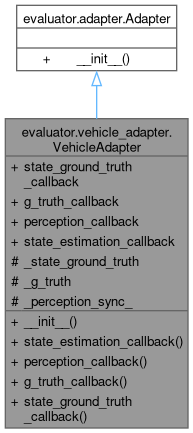
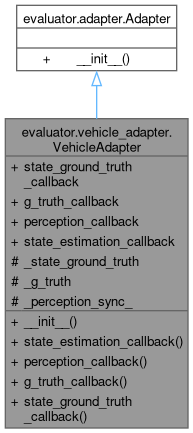
Adapater class to manage the use of the vehicle.
Definition at line 12 of file vehicle_adapter.py.
◆ __init__()
| evaluator.vehicle_adapter.VehicleAdapter.__init__ |
( |
|
self, |
|
|
rclpy.node.Node |
node |
|
) |
| |
◆ g_truth_callback()
| evaluator.vehicle_adapter.VehicleAdapter.g_truth_callback |
( |
|
self, |
|
|
MarkerArray |
g_truth |
|
) |
| |
Callback function for ground truth data.
Args:
g_truth (MarkerArray): The ground truth marker array.
Returns:
None
Definition at line 95 of file vehicle_adapter.py.
◆ perception_callback()
| evaluator.vehicle_adapter.VehicleAdapter.perception_callback |
( |
|
self, |
|
|
ConeArray |
perception |
|
) |
| |
Callback function for perception data.
Args:
perception (ConeArray): The perception output received.
Returns:
None
Definition at line 83 of file vehicle_adapter.py.
◆ state_estimation_callback()
| evaluator.vehicle_adapter.VehicleAdapter.state_estimation_callback |
( |
|
self, |
|
|
ConeArray |
map |
|
) |
| |
Callback function for state estimation data.
Args:
map (ConeArray): The state estimation output received.
Returns: None
Definition at line 59 of file vehicle_adapter.py.
◆ state_ground_truth_callback()
| evaluator.vehicle_adapter.VehicleAdapter.state_ground_truth_callback |
( |
|
self, |
|
|
MarkerArray |
state_ground_truth |
|
) |
| |
Callback function to process ground truth map messages.
Args: state_ground_truth (MarkerArray): Ground truth map data.
Definition at line 107 of file vehicle_adapter.py.
◆ _g_truth
| evaluator.vehicle_adapter.VehicleAdapter._g_truth |
|
protected |
◆ _perception_sync_
| evaluator.vehicle_adapter.VehicleAdapter._perception_sync_ |
|
protected |
◆ _state_ground_truth
| evaluator.vehicle_adapter.VehicleAdapter._state_ground_truth |
|
protected |
◆ g_truth_callback
| evaluator.vehicle_adapter.VehicleAdapter.g_truth_callback |
◆ perception_callback
| evaluator.vehicle_adapter.VehicleAdapter.perception_callback |
◆ state_estimation_callback
| evaluator.vehicle_adapter.VehicleAdapter.state_estimation_callback |
◆ state_ground_truth_callback
| evaluator.vehicle_adapter.VehicleAdapter.state_ground_truth_callback |
The documentation for this class was generated from the following file: