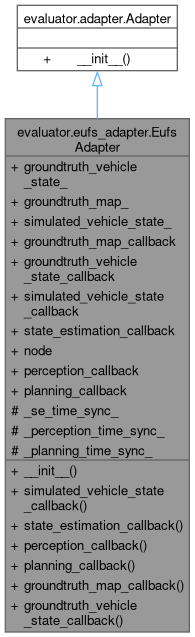
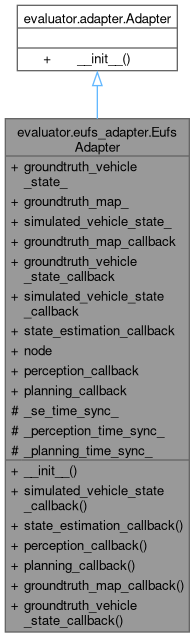
Adapter class for subscribing to EUFS topics. More...
Public Member Functions | |
| __init__ (self, rclpy.node.Node node) | |
| Initializes the EUFS Adapter. | |
| simulated_vehicle_state_callback (self, CarState msg) | |
| Callback function to mark the initial timestamp of the control execution. | |
| state_estimation_callback (self, VehicleState vehicle_state, ConeArray map) | |
| Callback function to process synchronized messages and compute state estimation metrics. | |
| perception_callback (self, ConeArray perception_output, ConeArrayWithCovariance ground_truth) | |
| Callback function to process synchronized messages and compute perception metrics. | |
| planning_callback (self, PathPointArray planning_output, PathPointArray path_ground_truth) | |
| Callback function to process synchronized messages and compute planning metrics. | |
| groundtruth_map_callback (self, ConeArrayWithCovariance track) | |
| Callback function to process groundtruth map messages. | |
| groundtruth_vehicle_state_callback (self, Odometry vehicle_state) | |
| Callback function to process groundtruth vehicle_state messages. | |
Protected Attributes | |
| _se_time_sync_ | |
| _perception_time_sync_ | |
| _planning_time_sync_ | |
Detailed Description
Adapter class for subscribing to EUFS topics.
Definition at line 21 of file eufs_adapter.py.
Constructor & Destructor Documentation
◆ __init__()
| evaluator.eufs_adapter.EufsAdapter.__init__ | ( | self, | |
| rclpy.node.Node | node | ||
| ) |
Initializes the EUFS Adapter.
Args: node (Node): ROS2 node instance.
Reimplemented from evaluator.adapter.Adapter.
Definition at line 26 of file eufs_adapter.py.
Member Function Documentation
◆ groundtruth_map_callback()
| evaluator.eufs_adapter.EufsAdapter.groundtruth_map_callback | ( | self, | |
| ConeArrayWithCovariance | track | ||
| ) |
Callback function to process groundtruth map messages.
Args: track (ConeArrayWithCovariance): Groundtruth track data.
Definition at line 197 of file eufs_adapter.py.
◆ groundtruth_vehicle_state_callback()
| evaluator.eufs_adapter.EufsAdapter.groundtruth_vehicle_state_callback | ( | self, | |
| Odometry | vehicle_state | ||
| ) |
Callback function to process groundtruth vehicle_state messages.
Args: vehicle_state (Odometry): Groundtruth vehicle_state data.
Definition at line 209 of file eufs_adapter.py.
◆ perception_callback()
| evaluator.eufs_adapter.EufsAdapter.perception_callback | ( | self, | |
| ConeArray | perception_output, | ||
| ConeArrayWithCovariance | ground_truth | ||
| ) |
Callback function to process synchronized messages and compute perception metrics.
Args: perception_output (ConeArray): Perception Output.
Definition at line 139 of file eufs_adapter.py.
◆ planning_callback()
| evaluator.eufs_adapter.EufsAdapter.planning_callback | ( | self, | |
| PathPointArray | planning_output, | ||
| PathPointArray | path_ground_truth | ||
| ) |
Callback function to process synchronized messages and compute planning metrics.
Args: map_ground_truth (ConeArrayWithCovariance): Groundtruth map message. planning_output (PathPointArray): Planning output. path_ground_truth (PathPointArray): Groundtruth path message.
Definition at line 159 of file eufs_adapter.py.
◆ simulated_vehicle_state_callback()
| evaluator.eufs_adapter.EufsAdapter.simulated_vehicle_state_callback | ( | self, | |
| CarState | msg | ||
| ) |
Callback function to mark the initial timestamp of the control execution.
Args: msg (CarState): Car state coming from EUFS simulator
Definition at line 95 of file eufs_adapter.py.
◆ state_estimation_callback()
| evaluator.eufs_adapter.EufsAdapter.state_estimation_callback | ( | self, | |
| VehicleState | vehicle_state, | ||
| ConeArray | map | ||
| ) |
Callback function to process synchronized messages and compute state estimation metrics.
Args: vehicle_state (VehicleState): Vehicle state estimation message. map (ConeArray): Cone array message.
Definition at line 104 of file eufs_adapter.py.
Member Data Documentation
◆ _perception_time_sync_
|
protected |
Definition at line 73 of file eufs_adapter.py.
◆ _planning_time_sync_
|
protected |
Definition at line 84 of file eufs_adapter.py.
◆ _se_time_sync_
|
protected |
Definition at line 59 of file eufs_adapter.py.
◆ groundtruth_map_
| evaluator.eufs_adapter.EufsAdapter.groundtruth_map_ |
Definition at line 36 of file eufs_adapter.py.
◆ groundtruth_map_callback
| evaluator.eufs_adapter.EufsAdapter.groundtruth_map_callback |
Definition at line 41 of file eufs_adapter.py.
◆ groundtruth_vehicle_state_
| evaluator.eufs_adapter.EufsAdapter.groundtruth_vehicle_state_ |
Definition at line 35 of file eufs_adapter.py.
◆ groundtruth_vehicle_state_callback
| evaluator.eufs_adapter.EufsAdapter.groundtruth_vehicle_state_callback |
Definition at line 48 of file eufs_adapter.py.
◆ node
| evaluator.eufs_adapter.EufsAdapter.node |
Definition at line 71 of file eufs_adapter.py.
◆ perception_callback
| evaluator.eufs_adapter.EufsAdapter.perception_callback |
Definition at line 82 of file eufs_adapter.py.
◆ planning_callback
| evaluator.eufs_adapter.EufsAdapter.planning_callback |
Definition at line 93 of file eufs_adapter.py.
◆ simulated_vehicle_state_
| evaluator.eufs_adapter.EufsAdapter.simulated_vehicle_state_ |
Definition at line 37 of file eufs_adapter.py.
◆ simulated_vehicle_state_callback
| evaluator.eufs_adapter.EufsAdapter.simulated_vehicle_state_callback |
Definition at line 55 of file eufs_adapter.py.
◆ state_estimation_callback
| evaluator.eufs_adapter.EufsAdapter.state_estimation_callback |
Definition at line 68 of file eufs_adapter.py.
The documentation for this class was generated from the following file:
- src/evaluator/evaluator/eufs_adapter.py