Loading...
Searching...
No Matches
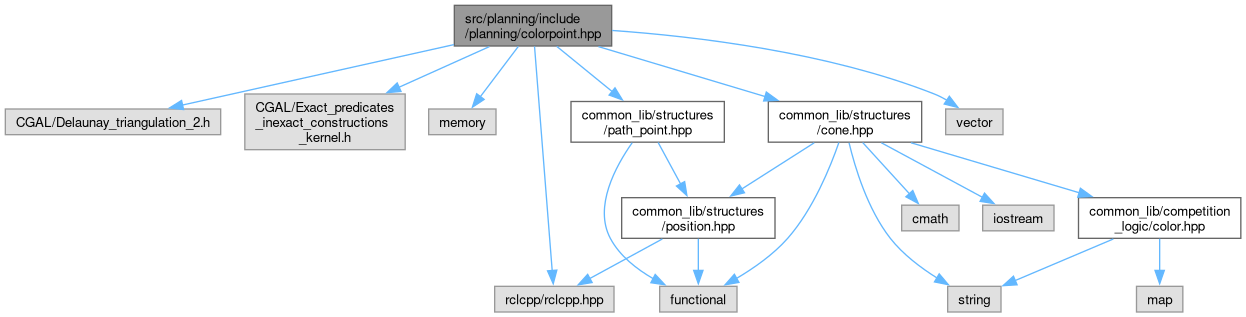
#include <CGAL/Delaunay_triangulation_2.h>#include <CGAL/Exact_predicates_inexact_constructions_kernel.h>#include <memory>#include <rclcpp/rclcpp.hpp>#include <vector>#include "common_lib/structures/cone.hpp"#include "common_lib/structures/path_point.hpp"
Include dependency graph for colorpoint.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | Colorpoint |
| Path point with two boundary cones, provides cone classification into left/right boundaries. More... | |
Typedefs | |
| using | K = CGAL::Exact_predicates_inexact_constructions_kernel |
| using | Point = K::Point_2 |
| using | Cone = common_lib::structures::Cone |
| using | Color = common_lib::competition_logic::Color |
| using | PathPoint = common_lib::structures::PathPoint |
Typedef Documentation
◆ Color
Definition at line 17 of file colorpoint.hpp.
◆ Cone
| using Cone = common_lib::structures::Cone |
Definition at line 16 of file colorpoint.hpp.
◆ K
| using K = CGAL::Exact_predicates_inexact_constructions_kernel |
Definition at line 14 of file colorpoint.hpp.
◆ PathPoint
Definition at line 18 of file colorpoint.hpp.
◆ Point
| using Point = K::Point_2 |
Definition at line 15 of file colorpoint.hpp.