Loading...
Searching...
No Matches
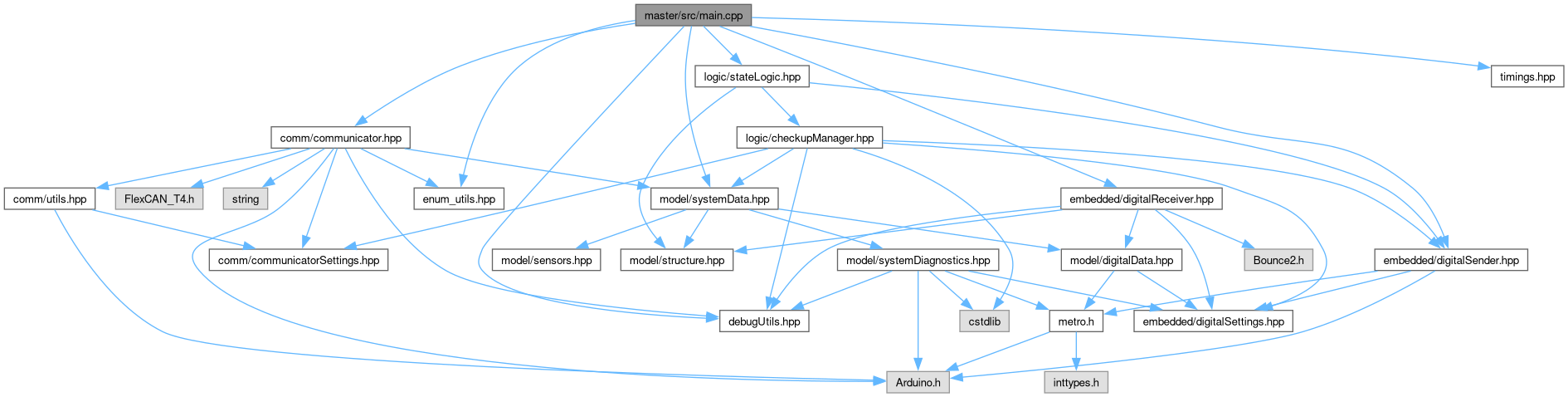
#include "comm/communicator.hpp"#include "debugUtils.hpp"#include "embedded/digitalReceiver.hpp"#include "embedded/digitalSender.hpp"#include "enum_utils.hpp"#include "logic/stateLogic.hpp"#include "model/systemData.hpp"#include "timings.hpp"
Include dependency graph for main.cpp:
Go to the source code of this file.
Functions | |
| void | setup () |
| void | loop () |
Variables | |
| SystemData | system_data |
| Communicator | communicator = Communicator(&system_data) |
| DigitalReceiver | digital_receiver |
| DigitalSender | digital_sender = DigitalSender() |
| ASState | as_state = ASState(&system_data, &communicator, &digital_sender) |
| Metro | rl_rpm_timer = Metro{LEFT_WHEEL_PUBLISH_INTERVAL} |
| Metro | mission_timer = Metro(MISSION_PUBLISH_INTERVAL) |
| Metro | state_timer = Metro(STATE_PUBLISH_INTERVAL) |
| IntervalTimer | state_calculation_timer |
| uint8_t | master_state_helper = static_cast<uint8_t>(15) |
| uint8_t | checkup_state_helper = static_cast<uint8_t>(15) |
| uint8_t | mission_helper = static_cast<uint8_t>(15) |
Function Documentation
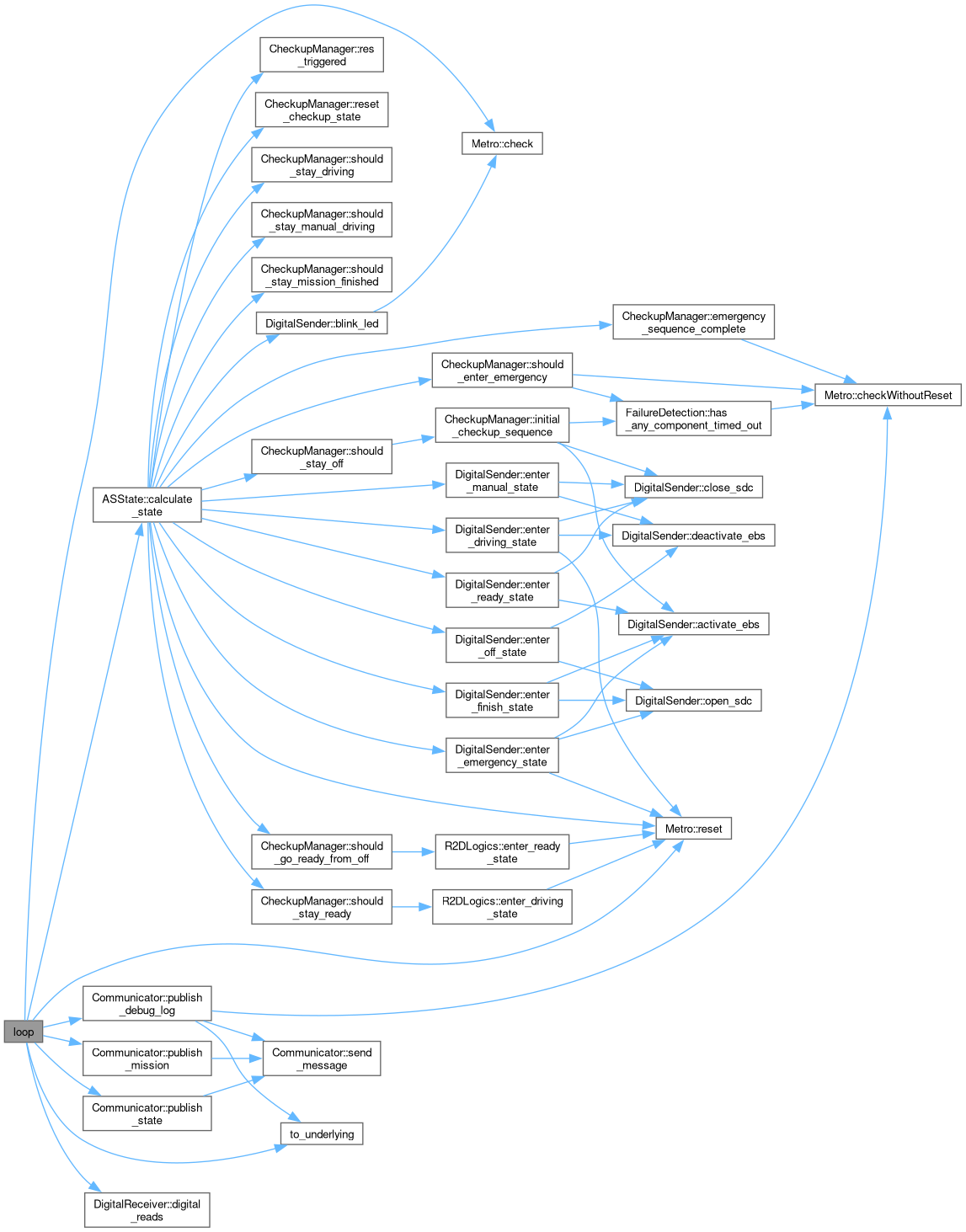
◆ loop()
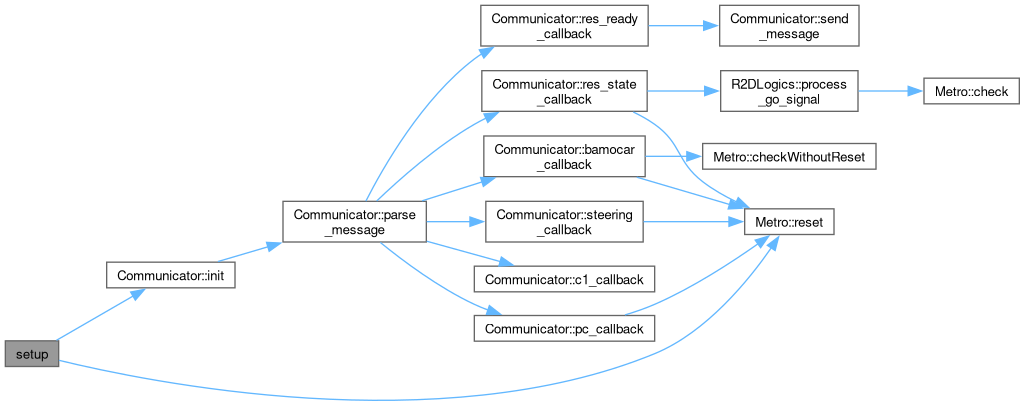
◆ setup()
Variable Documentation
◆ as_state
| ASState as_state = ASState(&system_data, &communicator, &digital_sender) |
◆ checkup_state_helper
◆ communicator
| Communicator communicator = Communicator(&system_data) |
◆ digital_receiver
| DigitalReceiver digital_receiver |
Initial value:
=
Class responsible for the reading of the digital inputs into the Master teensy.
Definition digitalReceiver.hpp:16
◆ digital_sender
| DigitalSender digital_sender = DigitalSender() |
◆ master_state_helper
◆ mission_helper
◆ mission_timer
| Metro mission_timer = Metro(MISSION_PUBLISH_INTERVAL) |
◆ rl_rpm_timer
| Metro rl_rpm_timer = Metro{LEFT_WHEEL_PUBLISH_INTERVAL} |
◆ state_calculation_timer
◆ state_timer
| Metro state_timer = Metro(STATE_PUBLISH_INTERVAL) |
◆ system_data
| SystemData system_data |