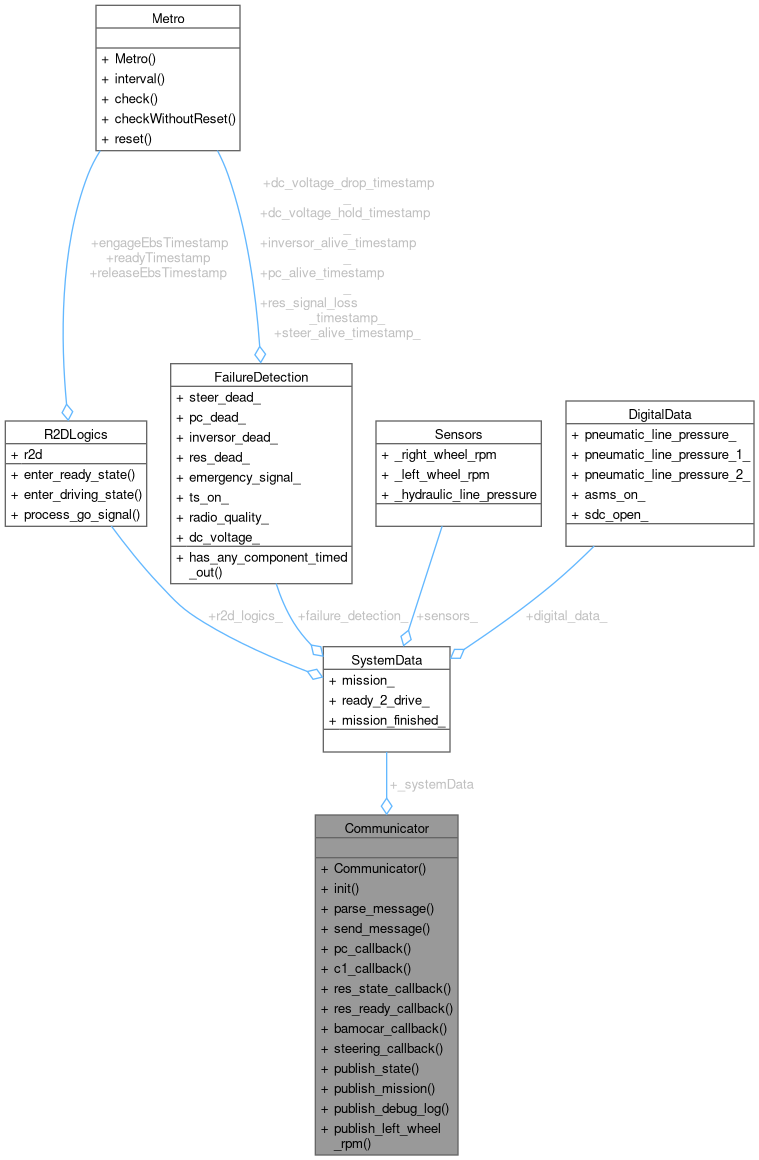
Class that contains definitions of typical messages to send via CAN It serves only as an example of the usage of the strategy pattern, where the communicator is the strategy. More...
#include <communicator.hpp>
Public Member Functions | |
| Communicator (SystemData *systemdata) | |
| Constructor for the Communicator class Initializes the Communicator with the given system data instance. | |
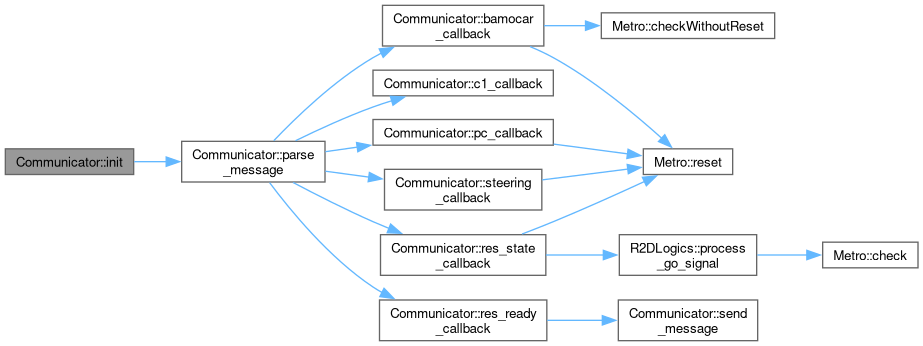
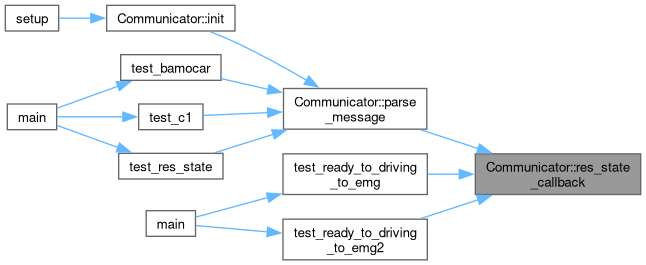
| void | init () |
| Initializes the CAN bus. | |
Static Public Member Functions | |
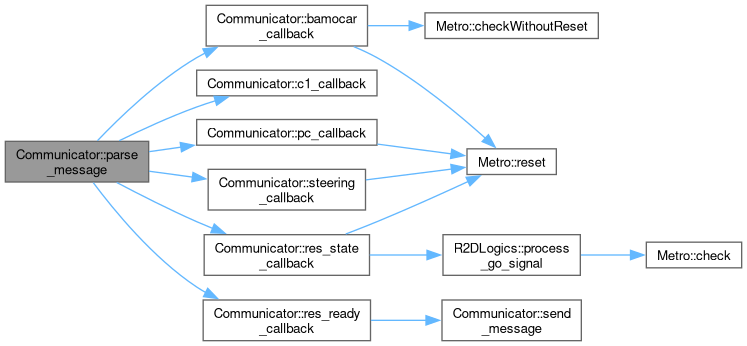
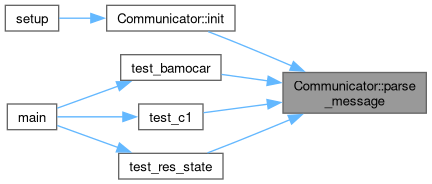
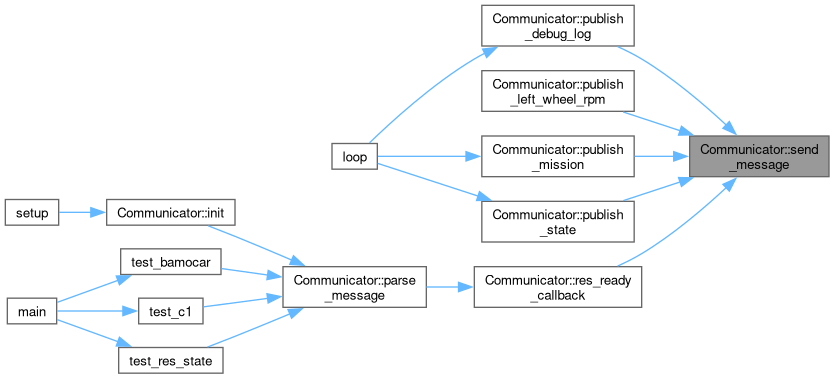
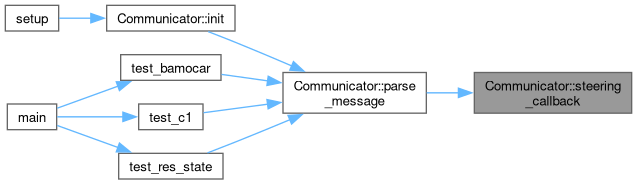
| static void | parse_message (const CAN_message_t &msg) |
| Parses the message received from the CAN bus. | |
| template<std::size_t N> | |
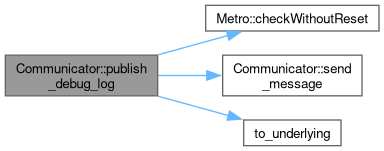
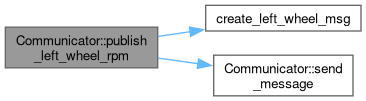
| static int | send_message (unsigned len, const std::array< uint8_t, N > &buffer, unsigned id) |
| Sends a message to the CAN bus. | |
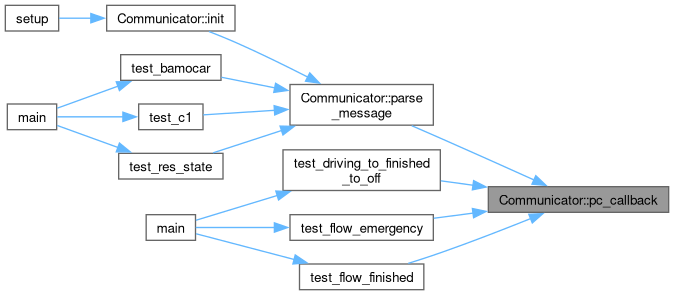
| static void | pc_callback (const uint8_t *buf) |
| Callback for message from AS CU. | |
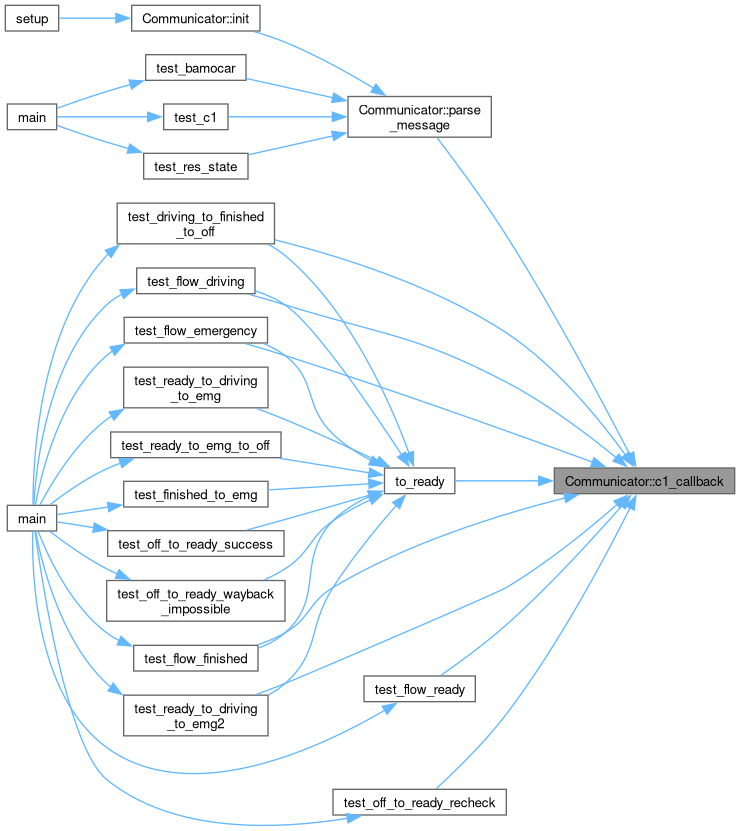
| static void | c1_callback (const uint8_t *buf) |
| Callback for data from C1 Teensy. | |
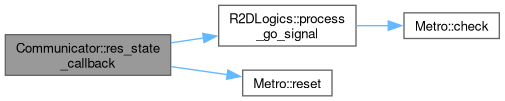
| static void | res_state_callback (const uint8_t *buf) |
| Callback RES default callback. | |
| static void | res_ready_callback () |
| Callback for RES activation. | |
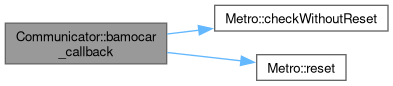
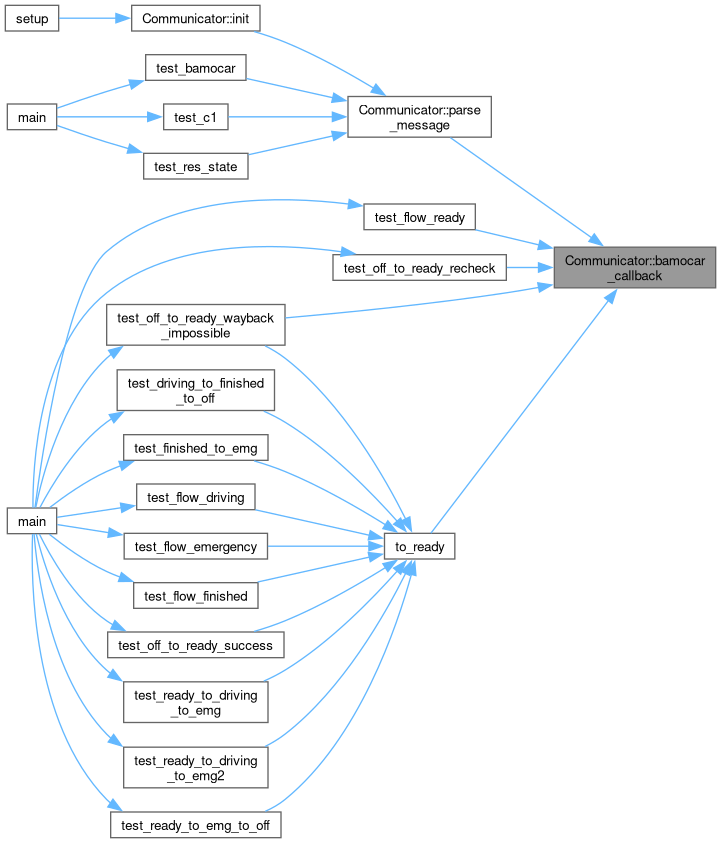
| static void | bamocar_callback (const uint8_t *buf) |
| Callback from inversor, for alive signal and data. | |
| static void | steering_callback () |
| Callback for steering actuator information. | |
| static int | publish_state (int state_id) |
| Publish AS State to CAN. | |
| static int | publish_mission (int mission_id) |
| Publish AS Mission to CAN. | |
| static int | publish_debug_log (SystemData system_data, uint8_t sate, uint8_t state_checkup) |
| Publish AS Mission to CAN. | |
| static int | publish_left_wheel_rpm (double value) |
| Publish rl wheel rpm to CAN. | |
Static Public Attributes | |
| static SystemData * | _systemData = nullptr |
Detailed Description
Class that contains definitions of typical messages to send via CAN It serves only as an example of the usage of the strategy pattern, where the communicator is the strategy.
Definition at line 39 of file communicator.hpp.
Constructor & Destructor Documentation
◆ Communicator()
|
inlineexplicit |
Constructor for the Communicator class Initializes the Communicator with the given system data instance.
- Parameters
-
system_data Pointer to the SystemData instance.
Definition at line 126 of file communicator.hpp.
Member Function Documentation
◆ bamocar_callback()
|
inlinestatic |
Callback from inversor, for alive signal and data.
Definition at line 202 of file communicator.hpp.
◆ c1_callback()
|
inlinestatic |
Callback for data from C1 Teensy.
Definition at line 152 of file communicator.hpp.
◆ init()
| void Communicator::init | ( | ) |
Initializes the CAN bus.
Definition at line 128 of file communicator.hpp.

◆ parse_message()
|
inlinestatic |
Parses the message received from the CAN bus.
Definition at line 248 of file communicator.hpp.
◆ pc_callback()
|
inlinestatic |
Callback for message from AS CU.
Definition at line 231 of file communicator.hpp.

◆ publish_debug_log()
|
inlinestatic |
Publish AS Mission to CAN.
Definition at line 285 of file communicator.hpp.

◆ publish_left_wheel_rpm()
|
inlinestatic |
Publish rl wheel rpm to CAN.
Definition at line 333 of file communicator.hpp.
◆ publish_mission()
|
inlinestatic |
Publish AS Mission to CAN.
Definition at line 278 of file communicator.hpp.


◆ publish_state()
|
inlinestatic |
Publish AS State to CAN.
Definition at line 272 of file communicator.hpp.


◆ res_ready_callback()
|
inlinestatic |
Callback for RES activation.
Definition at line 193 of file communicator.hpp.


◆ res_state_callback()
|
inlinestatic |
Callback RES default callback.
Definition at line 166 of file communicator.hpp.
◆ send_message()
|
inlinestatic |
Sends a message to the CAN bus.
- Parameters
-
len Length of the message buffer Buffer containing the message id ID of the message
- Returns
- 0 if successful
Definition at line 342 of file communicator.hpp.
◆ steering_callback()
|
inlinestatic |
Callback for steering actuator information.
Definition at line 244 of file communicator.hpp.

Member Data Documentation
◆ _systemData
|
inlinestatic |
Definition at line 46 of file communicator.hpp.
The documentation for this class was generated from the following file:
- master/include/comm/communicator.hpp