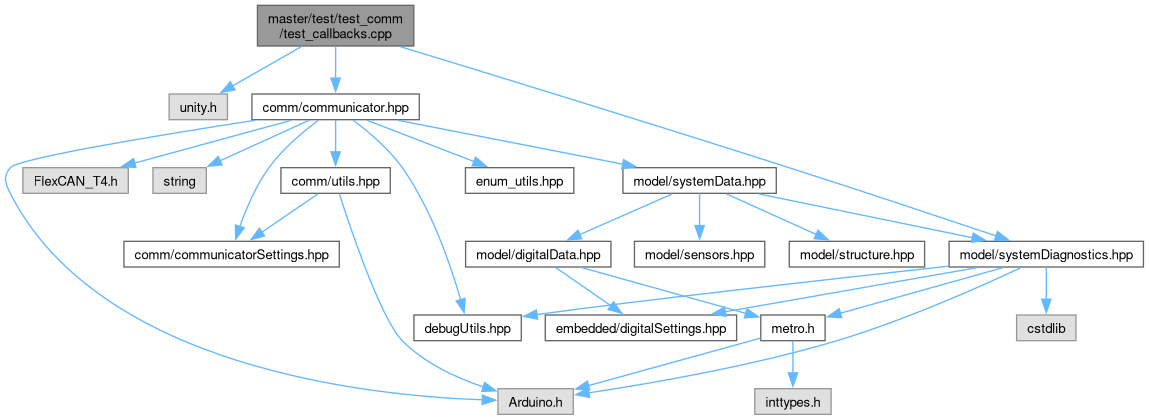
Go to the source code of this file.
Macros | |
| #define | BAMOCAR_VDC_HIGH 0x11 |
| #define | BAMOCAR_VDC_LOW 0x01 |
| #define | RES_READY_TRUE 0x01 |
| #define | RADIO_QUALITY_0 0x00 |
| #define | RADIO_QUALITY_100 0x64 |
| #define | RES_EMG_0 0x00 |
| #define | RES_EMG_3 0x00 |
| #define | RES_OK_0 0x01 |
| #define | RES_OK_3 0x80 |
Functions | |
| void | wss_message_zero_rpm (void) |
| Test if the message wheel rpm message is created correctly for a 0.0 rpm value. | |
| void | wss_message_high_rpm (void) |
| Test if the message wheel rpm message is created correctly for a large rpm value. | |
| void | wss_message_negative_rpm (void) |
| Test if the message wheel rpm message is created correctly for a negative rpm value. | |
| void | wss_message_small_rpm (void) |
| Test if the message wheel rpm message is created correctly for a small rpm value. | |
| void | test_c1 (void) |
| Tests if the messages from C1 are correctly parsed for Hydraulic Brake Pressure and Right Wheel Rpm's. | |
| void | test_bamocar (void) |
| Tests if the messages from Bamocar are correctly parsed and the Tractive System State is matching received info. | |
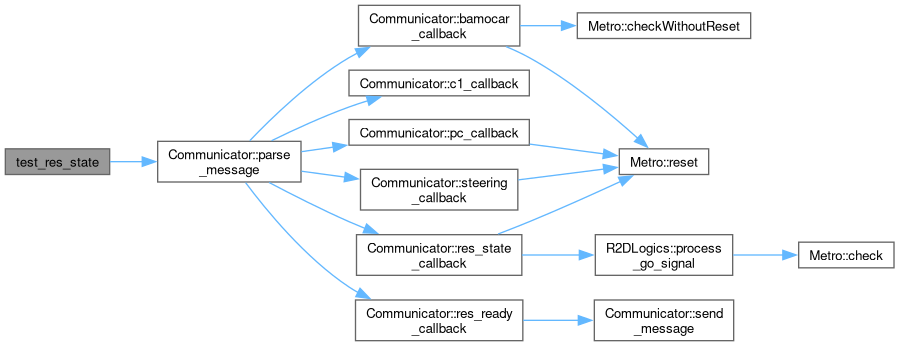
| void | test_res_state (void) |
| Tests if the messages from RES are correctly parsed for R2D and Emergency activations, aswell as for the radio quality indicator. | |
| void | setUp () |
| int | main (void) |
Variables | |
| SystemData | sd |
| CAN_message_t | msg |
Macro Definition Documentation
◆ BAMOCAR_VDC_HIGH
| #define BAMOCAR_VDC_HIGH 0x11 |
Definition at line 6 of file test_callbacks.cpp.
◆ BAMOCAR_VDC_LOW
| #define BAMOCAR_VDC_LOW 0x01 |
Definition at line 7 of file test_callbacks.cpp.
◆ RADIO_QUALITY_0
| #define RADIO_QUALITY_0 0x00 |
Definition at line 9 of file test_callbacks.cpp.
◆ RADIO_QUALITY_100
| #define RADIO_QUALITY_100 0x64 |
Definition at line 10 of file test_callbacks.cpp.
◆ RES_EMG_0
| #define RES_EMG_0 0x00 |
Definition at line 11 of file test_callbacks.cpp.
◆ RES_EMG_3
| #define RES_EMG_3 0x00 |
Definition at line 12 of file test_callbacks.cpp.
◆ RES_OK_0
| #define RES_OK_0 0x01 |
Definition at line 13 of file test_callbacks.cpp.
◆ RES_OK_3
| #define RES_OK_3 0x80 |
Definition at line 14 of file test_callbacks.cpp.
◆ RES_READY_TRUE
| #define RES_READY_TRUE 0x01 |
Definition at line 8 of file test_callbacks.cpp.
Function Documentation
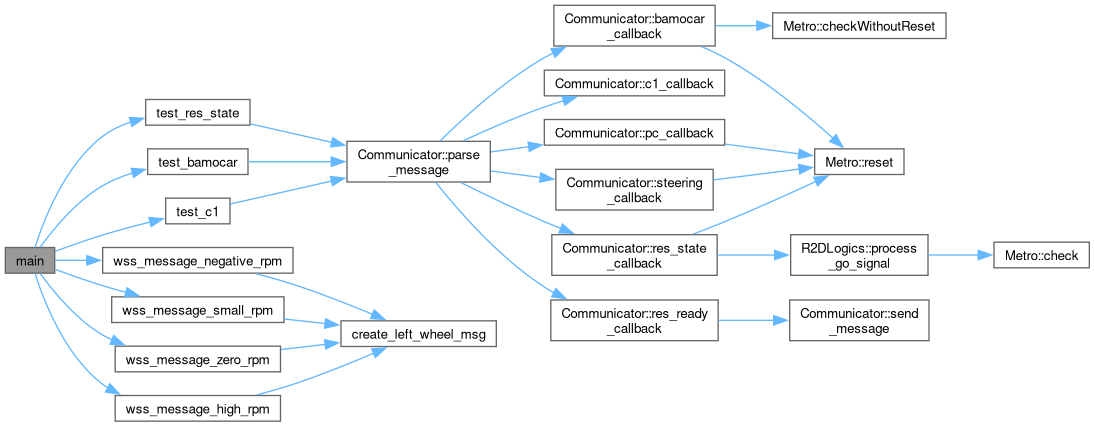
◆ main()
| int main | ( | void | ) |
◆ setUp()
| void setUp | ( | void | ) |
Definition at line 176 of file test_callbacks.cpp.
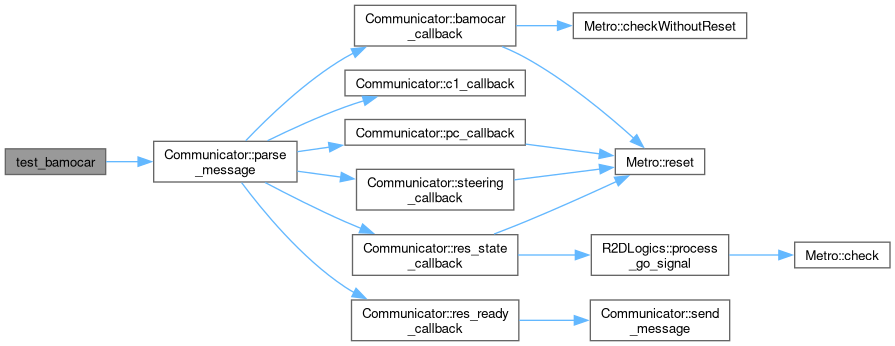
◆ test_bamocar()
| void test_bamocar | ( | void | ) |
Tests if the messages from Bamocar are correctly parsed and the Tractive System State is matching received info.
Definition at line 106 of file test_callbacks.cpp.

◆ test_c1()
| void test_c1 | ( | void | ) |
Tests if the messages from C1 are correctly parsed for Hydraulic Brake Pressure and Right Wheel Rpm's.
Definition at line 80 of file test_callbacks.cpp.

◆ test_res_state()
| void test_res_state | ( | void | ) |
Tests if the messages from RES are correctly parsed for R2D and Emergency activations, aswell as for the radio quality indicator.
Definition at line 138 of file test_callbacks.cpp.

◆ wss_message_high_rpm()
| void wss_message_high_rpm | ( | void | ) |
Test if the message wheel rpm message is created correctly for a large rpm value.
Definition at line 39 of file test_callbacks.cpp.


◆ wss_message_negative_rpm()
| void wss_message_negative_rpm | ( | void | ) |
Test if the message wheel rpm message is created correctly for a negative rpm value.
Definition at line 53 of file test_callbacks.cpp.


◆ wss_message_small_rpm()
| void wss_message_small_rpm | ( | void | ) |
Test if the message wheel rpm message is created correctly for a small rpm value.
Definition at line 67 of file test_callbacks.cpp.


◆ wss_message_zero_rpm()
| void wss_message_zero_rpm | ( | void | ) |
Test if the message wheel rpm message is created correctly for a 0.0 rpm value.
Definition at line 25 of file test_callbacks.cpp.


Variable Documentation
◆ msg
| CAN_message_t msg |
Definition at line 18 of file test_callbacks.cpp.
◆ sd
Definition at line 16 of file test_callbacks.cpp.