Loading...
Searching...
No Matches
PlanningConfig Struct Reference
#include <planning_config.hpp>
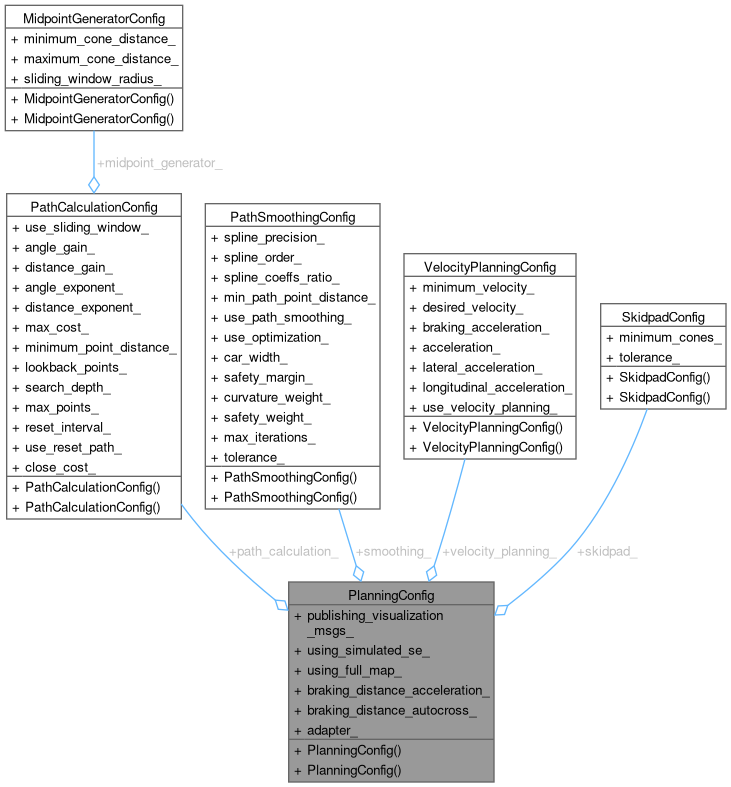
Collaboration diagram for PlanningConfig:
Public Member Functions | |
| PlanningConfig ()=default | |
| PlanningConfig (const PlanningParameters ¶ms) | |
Public Attributes | |
| PathCalculationConfig | path_calculation_ |
| PathSmoothingConfig | smoothing_ |
| VelocityPlanningConfig | velocity_planning_ |
| SkidpadConfig | skidpad_ |
| bool | publishing_visualization_msgs_ |
| bool | using_simulated_se_ |
| bool | using_full_map_ |
| double | braking_distance_acceleration_ |
| double | braking_distance_autocross_ |
| std::string | adapter_ |
Detailed Description
Definition at line 92 of file planning_config.hpp.
Constructor & Destructor Documentation
◆ PlanningConfig() [1/2]
|
default |
◆ PlanningConfig() [2/2]
|
inlineexplicit |
Definition at line 106 of file planning_config.hpp.
Member Data Documentation
◆ adapter_
| std::string PlanningConfig::adapter_ |
Definition at line 102 of file planning_config.hpp.
◆ braking_distance_acceleration_
| double PlanningConfig::braking_distance_acceleration_ |
Definition at line 100 of file planning_config.hpp.
◆ braking_distance_autocross_
| double PlanningConfig::braking_distance_autocross_ |
Definition at line 101 of file planning_config.hpp.
◆ path_calculation_
| PathCalculationConfig PlanningConfig::path_calculation_ |
Definition at line 93 of file planning_config.hpp.
◆ publishing_visualization_msgs_
| bool PlanningConfig::publishing_visualization_msgs_ |
Definition at line 97 of file planning_config.hpp.
◆ skidpad_
| SkidpadConfig PlanningConfig::skidpad_ |
Definition at line 96 of file planning_config.hpp.
◆ smoothing_
| PathSmoothingConfig PlanningConfig::smoothing_ |
Definition at line 94 of file planning_config.hpp.
◆ using_full_map_
| bool PlanningConfig::using_full_map_ |
Definition at line 99 of file planning_config.hpp.
◆ using_simulated_se_
| bool PlanningConfig::using_simulated_se_ |
Definition at line 98 of file planning_config.hpp.
◆ velocity_planning_
| VelocityPlanningConfig PlanningConfig::velocity_planning_ |
Definition at line 95 of file planning_config.hpp.
The documentation for this struct was generated from the following file:
- src/planning/include/config/planning_config.hpp