#include <path_calculation_config.hpp>
Public Member Functions | |
| PathCalculationConfig () | |
| Default constructor. | |
| PathCalculationConfig (const MidpointGeneratorConfig &mg_config, bool use_sliding_window, double angle_gain, double distance_gain, double angle_exponent, double distance_exponent, double max_cost, double minimum_point_distance, int lookback_points, int search_depth, int max_points, int reset_interval, bool use_reset_path, double close_cost) | |
| Parameterized constructor. | |
Public Attributes | |
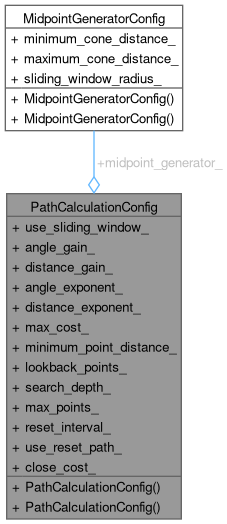
| MidpointGeneratorConfig | midpoint_generator_ |
| Configuration for the Midpoint Generator class. | |
| bool | use_sliding_window_ |
| Flag to enable/disable the sliding window for path calculation. | |
| double | angle_gain_ |
| Gain applied to the angle term in the cost function. | |
| double | distance_gain_ |
| Gain applied to the distance term in the cost function. | |
| double | angle_exponent_ |
| Exponent applied to the angle term in the cost function. | |
| double | distance_exponent_ |
| Exponent applied to the distance term in the cost function. | |
| double | max_cost_ |
| Maximum allowed cost for a path. | |
| double | minimum_point_distance_ |
| Minimum allowed distance between consecutive points in the generated path. | |
| int | lookback_points_ |
| Number of recent path points discarded and recalculated each iteration. | |
| int | search_depth_ |
| Maximum search depth when exploring candidate paths. | |
| int | max_points_ |
| Maximum number of points added in an iteration. | |
| int | reset_interval_ |
| Number of iterations before triggering a full path regeneration. | |
| bool | use_reset_path_ |
| Flag to enable/disable path reset logic. | |
| double | close_cost_ |
| Cost threshold to determine whether the path is considered closed. | |
Detailed Description
Definition at line 6 of file path_calculation_config.hpp.
Constructor & Destructor Documentation
◆ PathCalculationConfig() [1/2]
|
inline |
Default constructor.
Definition at line 80 of file path_calculation_config.hpp.
◆ PathCalculationConfig() [2/2]
|
inline |
Parameterized constructor.
Definition at line 99 of file path_calculation_config.hpp.
Member Data Documentation
◆ angle_exponent_
| double PathCalculationConfig::angle_exponent_ |
Exponent applied to the angle term in the cost function.
Definition at line 30 of file path_calculation_config.hpp.
◆ angle_gain_
| double PathCalculationConfig::angle_gain_ |
Gain applied to the angle term in the cost function.
Definition at line 20 of file path_calculation_config.hpp.
◆ close_cost_
| double PathCalculationConfig::close_cost_ |
Cost threshold to determine whether the path is considered closed.
Definition at line 75 of file path_calculation_config.hpp.
◆ distance_exponent_
| double PathCalculationConfig::distance_exponent_ |
Exponent applied to the distance term in the cost function.
Definition at line 35 of file path_calculation_config.hpp.
◆ distance_gain_
| double PathCalculationConfig::distance_gain_ |
Gain applied to the distance term in the cost function.
Definition at line 25 of file path_calculation_config.hpp.
◆ lookback_points_
| int PathCalculationConfig::lookback_points_ |
Number of recent path points discarded and recalculated each iteration.
Definition at line 50 of file path_calculation_config.hpp.
◆ max_cost_
| double PathCalculationConfig::max_cost_ |
Maximum allowed cost for a path.
Definition at line 40 of file path_calculation_config.hpp.
◆ max_points_
| int PathCalculationConfig::max_points_ |
Maximum number of points added in an iteration.
Definition at line 60 of file path_calculation_config.hpp.
◆ midpoint_generator_
| MidpointGeneratorConfig PathCalculationConfig::midpoint_generator_ |
Configuration for the Midpoint Generator class.
Definition at line 10 of file path_calculation_config.hpp.
◆ minimum_point_distance_
| double PathCalculationConfig::minimum_point_distance_ |
Minimum allowed distance between consecutive points in the generated path.
Definition at line 45 of file path_calculation_config.hpp.
◆ reset_interval_
| int PathCalculationConfig::reset_interval_ |
Number of iterations before triggering a full path regeneration.
Definition at line 65 of file path_calculation_config.hpp.
◆ search_depth_
| int PathCalculationConfig::search_depth_ |
Maximum search depth when exploring candidate paths.
Definition at line 55 of file path_calculation_config.hpp.
◆ use_reset_path_
| bool PathCalculationConfig::use_reset_path_ |
Flag to enable/disable path reset logic.
Definition at line 70 of file path_calculation_config.hpp.
◆ use_sliding_window_
| bool PathCalculationConfig::use_sliding_window_ |
Flag to enable/disable the sliding window for path calculation.
Definition at line 15 of file path_calculation_config.hpp.
The documentation for this struct was generated from the following file:
- src/planning/include/config/path_calculation_config.hpp