Loading...
Searching...
No Matches
Skidpad Class Reference
class that defines the skidpad path algorithm More...
#include <skidpad.hpp>
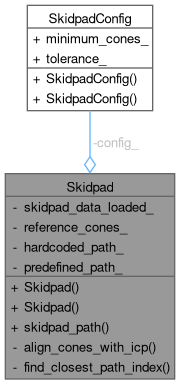
Collaboration diagram for Skidpad:
Public Member Functions | |
| Skidpad ()=default | |
| Skidpad (SkidpadConfig config) | |
| std::vector< PathPoint > | skidpad_path (const std::vector< Cone > &cone_array, common_lib::structures::Pose pose) |
| Generate a path for skidpad course. | |
Private Member Functions | |
| Eigen::Matrix4f | align_cones_with_icp (const std::vector< Cone > &cone_array) |
| Aligns detected cones with reference cones using ICP. | |
| size_t | find_closest_path_index (const std::vector< PathPoint > &path, const common_lib::structures::Pose &pose) |
| Finds the closest point index in a path to a given pose. | |
Private Attributes | |
| SkidpadConfig | config_ |
| bool | skidpad_data_loaded_ = false |
| std::vector< std::pair< double, double > > | reference_cones_ |
| std::vector< PathPoint > | hardcoded_path_ |
| std::vector< PathPoint > | predefined_path_ |
Detailed Description
class that defines the skidpad path algorithm
Definition at line 23 of file skidpad.hpp.
Constructor & Destructor Documentation
◆ Skidpad() [1/2]
|
default |
◆ Skidpad() [2/2]
|
inlineexplicit |
Definition at line 28 of file skidpad.hpp.
Member Function Documentation
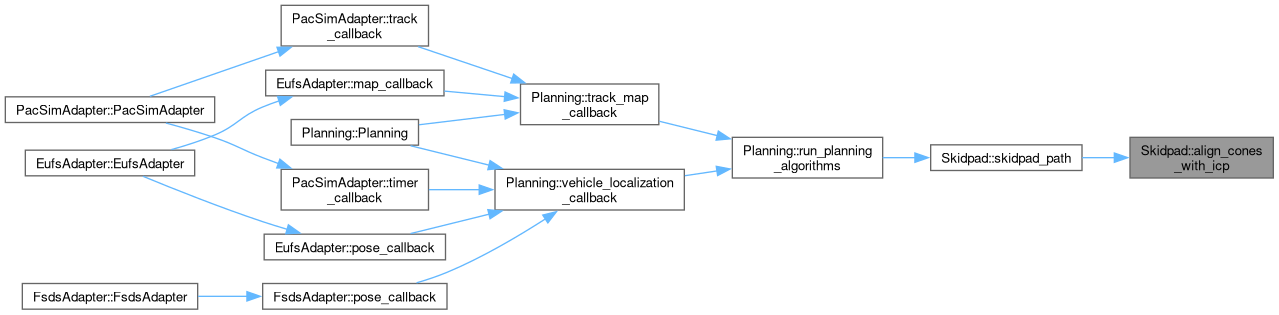
◆ align_cones_with_icp()
|
private |
Aligns detected cones with reference cones using ICP.
- Parameters
-
cone_array Detected cones
- Returns
- Eigen::Matrix4f Transformation matrix, or identity if ICP fails
Definition at line 18 of file skidpad.cpp.
Here is the caller graph for this function:
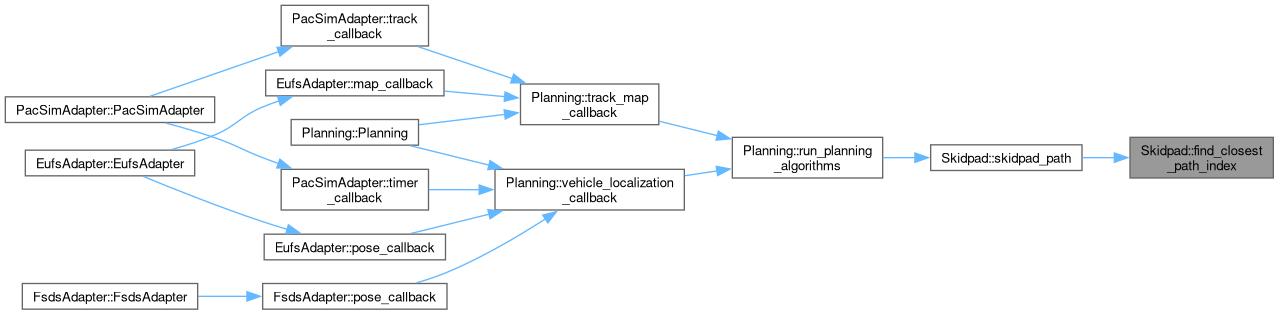
◆ find_closest_path_index()
|
private |
Finds the closest point index in a path to a given pose.
- Parameters
-
path Path to search pose Reference pose
- Returns
- size_t Index of closest point
Definition at line 60 of file skidpad.cpp.
Here is the caller graph for this function:
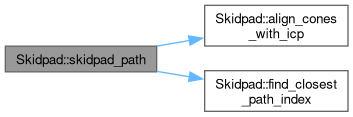
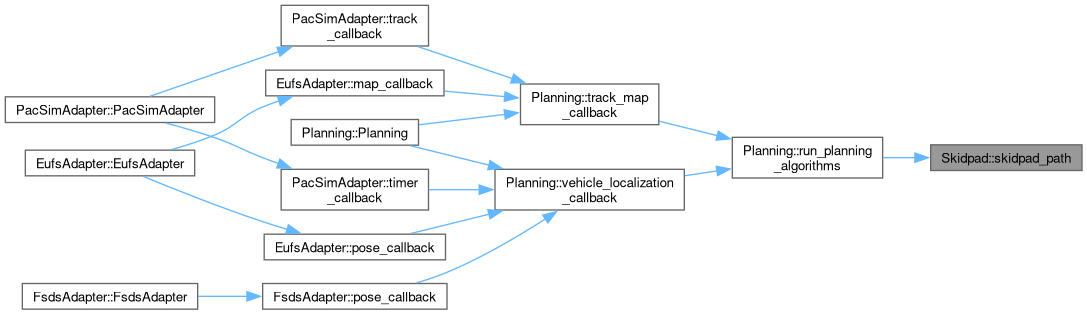
◆ skidpad_path()
| std::vector< PathPoint > Skidpad::skidpad_path | ( | const std::vector< Cone > & | cone_array, |
| common_lib::structures::Pose | pose | ||
| ) |
Generate a path for skidpad course.
- Parameters
-
cone_array The array of cones representing the track pose The current pose of the vehicle
- Returns
- std::vector<PathPoint> The generated path
Definition at line 85 of file skidpad.cpp.
Here is the call graph for this function:
Here is the caller graph for this function:
Member Data Documentation
◆ config_
|
private |
Definition at line 41 of file skidpad.hpp.
◆ hardcoded_path_
|
private |
Definition at line 45 of file skidpad.hpp.
◆ predefined_path_
|
private |
Definition at line 46 of file skidpad.hpp.
◆ reference_cones_
|
private |
Definition at line 44 of file skidpad.hpp.
◆ skidpad_data_loaded_
|
private |
Definition at line 43 of file skidpad.hpp.
The documentation for this class was generated from the following files:
- src/planning/include/planning/skidpad.hpp
- src/planning/src/planning/skidpad.cpp