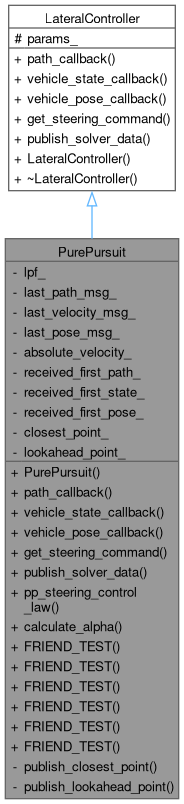
Pure Pursuit class. More...
#include <pure_pursuit.hpp>
Public Member Functions | |
| PurePursuit (const ControlParameters ¶ms) | |
| Construct a new Pure Pursuit object. | |
| void | path_callback (const custom_interfaces::msg::PathPointArray &msg) override |
| Called when a new path is sent by Path Planning. | |
| void | vehicle_state_callback (const custom_interfaces::msg::Velocities &msg) override |
| Called when the car state (currently just velocity) is updated. | |
| void | vehicle_pose_callback (const custom_interfaces::msg::Pose &msg) override |
| Called when the car pose is updated by SLAM. | |
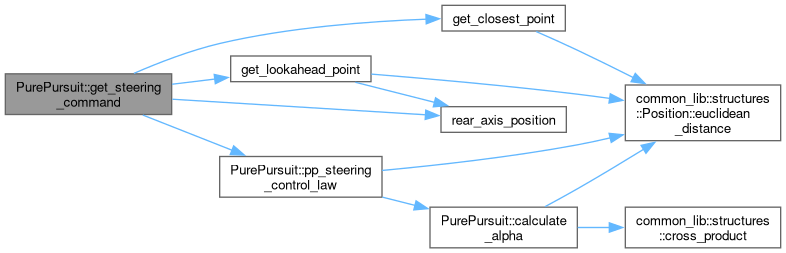
| double | get_steering_command () override |
| Returns the steering command calculated by the solver. | |
| void | publish_solver_data (std::shared_ptr< rclcpp::Node > node, std::map< std::string, std::shared_ptr< rclcpp::PublisherBase > > &publisher_map) override |
| Publishes solver specific data using the provided ControlNode. | |
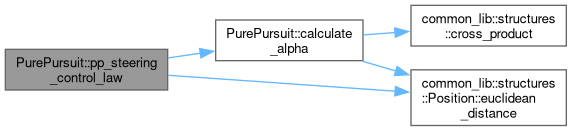
| double | pp_steering_control_law (common_lib::structures::Position rear_axis, common_lib::structures::Position cg, common_lib::structures::Position lookahead_point, double dist_cg_2_rear_axis) |
| Pure Pursuit control law. | |
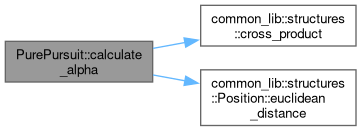
| double | calculate_alpha (common_lib::structures::Position vehicle_rear_wheel, common_lib::structures::Position vehicle_cg, common_lib::structures::Position lookahead_point, double rear_wheel_2_c_g) |
| Calculate alpha (angle between the vehicle and lookahead point) | |
| FRIEND_TEST (PurePursuitTests, Test_calculate_alpha_1) | |
| FRIEND_TEST (PurePursuitTests, Test_calculate_alpha_2) | |
| FRIEND_TEST (PurePursuitTests, Test_calculate_alpha_3) | |
| FRIEND_TEST (PurePursuitTests, Test_calculate_alpha_4) | |
| FRIEND_TEST (PurePursuitTests, Test_calculate_alpha_5) | |
| FRIEND_TEST (PurePursuitTests, Test_pp_steering_control_law_1) | |
 Public Member Functions inherited from LateralController Public Member Functions inherited from LateralController | |
| LateralController (const ControlParameters ¶ms) | |
| virtual | ~LateralController ()=default |
Private Member Functions | |
| void | publish_closest_point (std::shared_ptr< rclcpp::Node > node, std::map< std::string, std::shared_ptr< rclcpp::PublisherBase > > &publisher_map) |
| Function that publishes the closest point marker. | |
| void | publish_lookahead_point (std::shared_ptr< rclcpp::Node > node, std::map< std::string, std::shared_ptr< rclcpp::PublisherBase > > &publisher_map) |
| Function that publishes the lookahead point marker. | |
Private Attributes | |
| std::shared_ptr< Filter > | lpf_ |
| std::vector< custom_interfaces::msg::PathPoint > | last_path_msg_ |
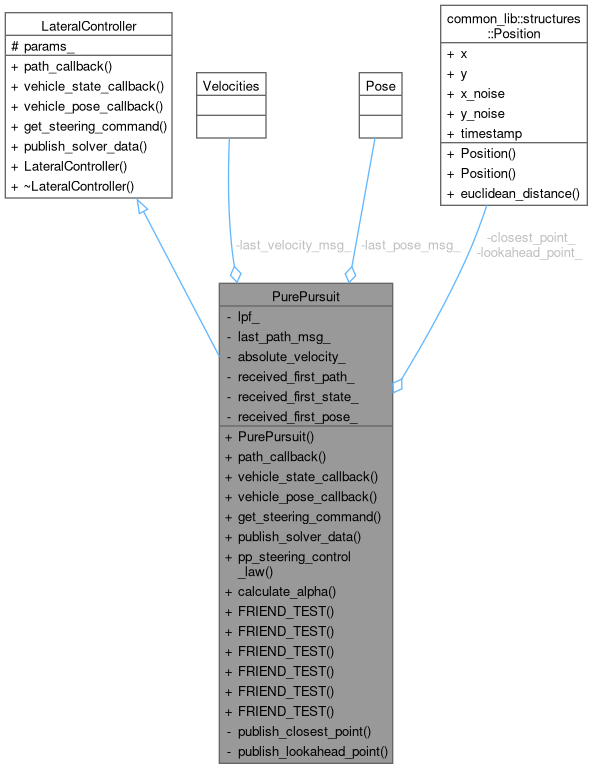
| custom_interfaces::msg::Velocities | last_velocity_msg_ |
| custom_interfaces::msg::Pose | last_pose_msg_ |
| double | absolute_velocity_ = 0.0 |
| bool | received_first_path_ = false |
| bool | received_first_state_ = false |
| bool | received_first_pose_ = false |
| common_lib::structures::Position | closest_point_ |
| common_lib::structures::Position | lookahead_point_ |
Additional Inherited Members | |
| Protected Attributes inherited from LateralController | |
| std::shared_ptr< ControlParameters > | params_ |
Detailed Description
Pure Pursuit class.
This class implements a Pure Pursuit controller. This assumes a bicycle model for the vehicle. The two main functions are:
- Calculate the lookahead point
- Calculate the steering angle (Pure Pursuit Control Law)
Definition at line 26 of file pure_pursuit.hpp.
Constructor & Destructor Documentation
◆ PurePursuit()
| PurePursuit::PurePursuit | ( | const ControlParameters & | params | ) |
Construct a new Pure Pursuit object.
Pure Pursuit class Constructor.
- Parameters
-
params Control parameters
Definition at line 9 of file pure_pursuit.cpp.
Member Function Documentation
◆ calculate_alpha()
| double PurePursuit::calculate_alpha | ( | common_lib::structures::Position | vehicle_rear_wheel, |
| common_lib::structures::Position | vehicle_cg, | ||
| common_lib::structures::Position | lookahead_point, | ||
| double | rear_wheel_2_c_g | ||
| ) |
Calculate alpha (angle between the vehicle and lookahead point)
- Parameters
-
vehicle_rear_wheel vehicle_cg lookahead_point dist_cg_2_rear_axis
- Returns
- double
Definition at line 72 of file pure_pursuit.cpp.

◆ FRIEND_TEST() [1/6]
| PurePursuit::FRIEND_TEST | ( | PurePursuitTests | , |
| Test_calculate_alpha_1 | |||
| ) |
◆ FRIEND_TEST() [2/6]
| PurePursuit::FRIEND_TEST | ( | PurePursuitTests | , |
| Test_calculate_alpha_2 | |||
| ) |
◆ FRIEND_TEST() [3/6]
| PurePursuit::FRIEND_TEST | ( | PurePursuitTests | , |
| Test_calculate_alpha_3 | |||
| ) |
◆ FRIEND_TEST() [4/6]
| PurePursuit::FRIEND_TEST | ( | PurePursuitTests | , |
| Test_calculate_alpha_4 | |||
| ) |
◆ FRIEND_TEST() [5/6]
| PurePursuit::FRIEND_TEST | ( | PurePursuitTests | , |
| Test_calculate_alpha_5 | |||
| ) |
◆ FRIEND_TEST() [6/6]
| PurePursuit::FRIEND_TEST | ( | PurePursuitTests | , |
| Test_pp_steering_control_law_1 | |||
| ) |
◆ get_steering_command()
|
overridevirtual |
Returns the steering command calculated by the solver.
Implements LateralController.
Definition at line 28 of file pure_pursuit.cpp.
◆ path_callback()
|
overridevirtual |
Called when a new path is sent by Path Planning.
Implements LateralController.
Definition at line 12 of file pure_pursuit.cpp.
◆ pp_steering_control_law()
| double PurePursuit::pp_steering_control_law | ( | common_lib::structures::Position | rear_axis, |
| common_lib::structures::Position | cg, | ||
| common_lib::structures::Position | lookahead_point, | ||
| double | dist_cg_2_rear_axis | ||
| ) |
Pure Pursuit control law.
- Parameters
-
rear_axis cg center of gravity lookahead_point dist_cg_2_rear_axis distance between center of gravity and rear axis
- Returns
- Steering angle
Definition at line 59 of file pure_pursuit.cpp.

◆ publish_closest_point()
|
private |
Function that publishes the closest point marker.
- Parameters
-
node pointer to the rclcpp node publisher_map map between topic names and publishers
Definition at line 97 of file pure_pursuit.cpp.


◆ publish_lookahead_point()
|
private |
Function that publishes the lookahead point marker.
- Parameters
-
node pointer to the rclcpp node publisher_map map between topic names and publishers
Definition at line 109 of file pure_pursuit.cpp.


◆ publish_solver_data()
|
overridevirtual |
Publishes solver specific data using the provided ControlNode.
- Parameters
-
node shared pointer to the ControlNode publisher_map map of topic names to publisher pointers
Implements LateralController.
Definition at line 92 of file pure_pursuit.cpp.

◆ vehicle_pose_callback()
|
overridevirtual |
Called when the car pose is updated by SLAM.
Implements LateralController.
Definition at line 23 of file pure_pursuit.cpp.
◆ vehicle_state_callback()
|
overridevirtual |
Called when the car state (currently just velocity) is updated.
Implements LateralController.
Definition at line 17 of file pure_pursuit.cpp.
Member Data Documentation
◆ absolute_velocity_
|
private |
Definition at line 35 of file pure_pursuit.hpp.
◆ closest_point_
|
private |
Definition at line 43 of file pure_pursuit.hpp.
◆ last_path_msg_
|
private |
Definition at line 32 of file pure_pursuit.hpp.
◆ last_pose_msg_
|
private |
Definition at line 34 of file pure_pursuit.hpp.
◆ last_velocity_msg_
|
private |
Definition at line 33 of file pure_pursuit.hpp.
◆ lookahead_point_
|
private |
Definition at line 44 of file pure_pursuit.hpp.
◆ lpf_
|
private |
Definition at line 29 of file pure_pursuit.hpp.
◆ received_first_path_
|
private |
Definition at line 38 of file pure_pursuit.hpp.
◆ received_first_pose_
|
private |
Definition at line 40 of file pure_pursuit.hpp.
◆ received_first_state_
|
private |
Definition at line 39 of file pure_pursuit.hpp.
The documentation for this class was generated from the following files:
- src/control/include/lateral_controller/pure_pursuit.hpp
- src/control/src/lateral_controller/pure_pursuit.cpp