Loading...
Searching...
No Matches
main.cpp File Reference
Include dependency graph for main.cpp:
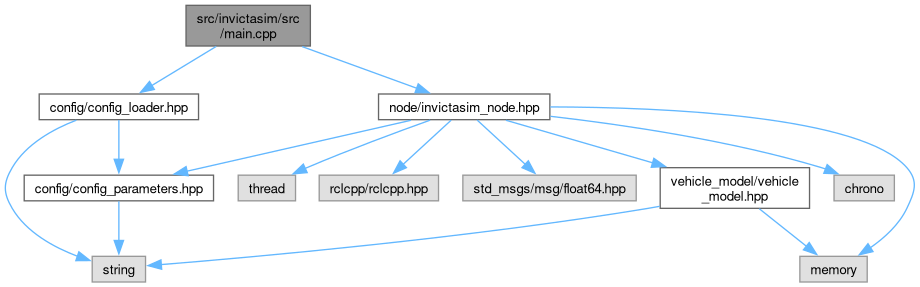
Go to the source code of this file.
Functions | |
| int | main (int argc, char *argv[]) |
| Main function for the invictasim node. | |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
Main function for the invictasim node.
Initializes the ROS node, loads configuration parameters, creates the InvictaSimNode, enters the ROS 2 event loop, and shuts down when done.
- Returns
- 0 on successful completion.
Definition at line 13 of file main.cpp.
Here is the call graph for this function:
