Loading...
Searching...
No Matches
InvictaSimNode Class Reference
#include <invictasim_node.hpp>
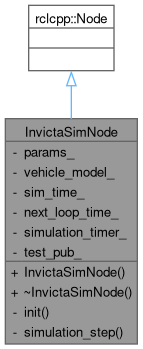
Inheritance diagram for InvictaSimNode:
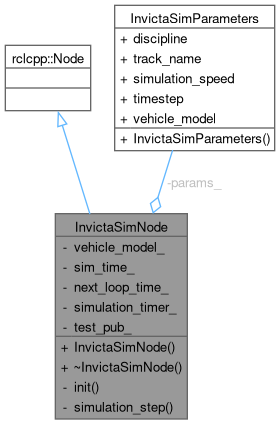
Collaboration diagram for InvictaSimNode:
Public Member Functions | |
| InvictaSimNode (const InvictaSimParameters ¶ms) | |
| Constructor. | |
| ~InvictaSimNode ()=default | |
| Destructor. | |
Private Member Functions | |
| void | init () |
| Initialize the simulator node. | |
| void | simulation_step () |
| Perform a single simulation step. | |
Private Attributes | |
| InvictaSimParameters | params_ |
| std::shared_ptr< VehicleModel > | vehicle_model_ |
| double | sim_time_ |
| std::chrono::steady_clock::time_point | next_loop_time_ |
| rclcpp::TimerBase::SharedPtr | simulation_timer_ |
| rclcpp::Publisher< std_msgs::msg::Float64 >::SharedPtr | test_pub_ |
Detailed Description
Definition at line 12 of file invictasim_node.hpp.
Constructor & Destructor Documentation
◆ InvictaSimNode()
|
explicit |
Constructor.
Definition at line 7 of file invictasim_node.cpp.
Here is the call graph for this function:

◆ ~InvictaSimNode()
|
default |
Destructor.
Member Function Documentation
◆ init()
|
private |
Initialize the simulator node.
Definition at line 25 of file invictasim_node.cpp.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ simulation_step()
|
private |
Perform a single simulation step.
Definition at line 35 of file invictasim_node.cpp.
Here is the caller graph for this function:

Member Data Documentation
◆ next_loop_time_
|
private |
Definition at line 32 of file invictasim_node.hpp.
◆ params_
|
private |
Definition at line 25 of file invictasim_node.hpp.
◆ sim_time_
|
private |
Definition at line 31 of file invictasim_node.hpp.
◆ simulation_timer_
|
private |
Definition at line 33 of file invictasim_node.hpp.
◆ test_pub_
|
private |
Definition at line 36 of file invictasim_node.hpp.
◆ vehicle_model_
|
private |
Definition at line 28 of file invictasim_node.hpp.
The documentation for this class was generated from the following files:
- src/invictasim/include/node/invictasim_node.hpp
- src/invictasim/src/node/invictasim_node.cpp