Loading...
Searching...
No Matches
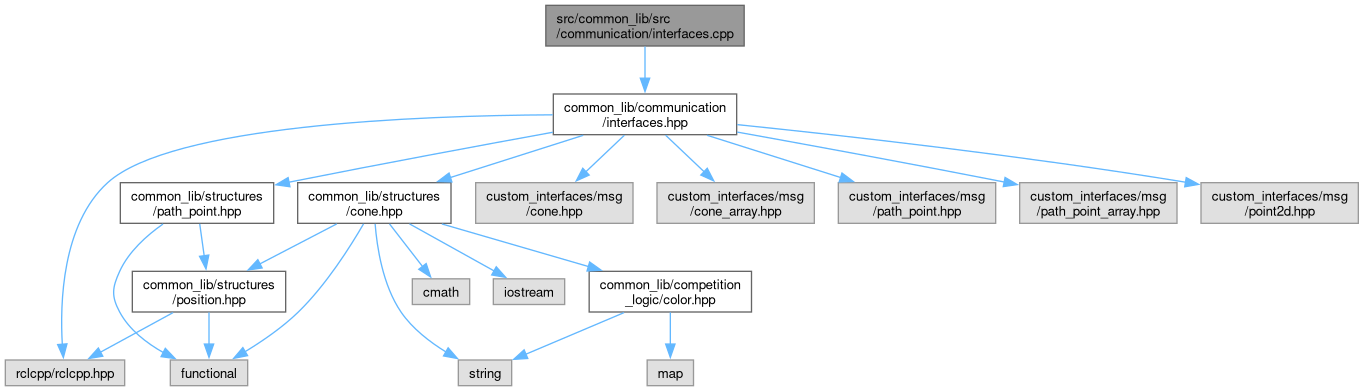
interfaces.cpp File Reference
#include "common_lib/communication/interfaces.hpp"
Include dependency graph for interfaces.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | common_lib |
| namespace | common_lib::communication |
Functions | |
| std::vector< common_lib::structures::PathPoint > | common_lib::communication::path_point_array_from_ci_vector (const custom_interfaces::msg::PathPointArray &path_point_array) |
| Convert from custom interfaces PathPointArray to vector of common_lib PathPoints. | |
| custom_interfaces::msg::ConeArray | common_lib::communication::custom_interfaces_array_from_vector (const std::vector< common_lib::structures::Cone > &input_cones) |
| custom_interfaces::msg::PathPointArray | common_lib::communication::custom_interfaces_array_from_vector (const std::vector< common_lib::structures::PathPoint > &input_path, bool is_map_closed) |
| std::vector< common_lib::structures::Cone > | common_lib::communication::cone_vector_from_custom_interfaces (const custom_interfaces::msg::ConeArray &msg) |