Loading...
Searching...
No Matches
map.hpp File Reference
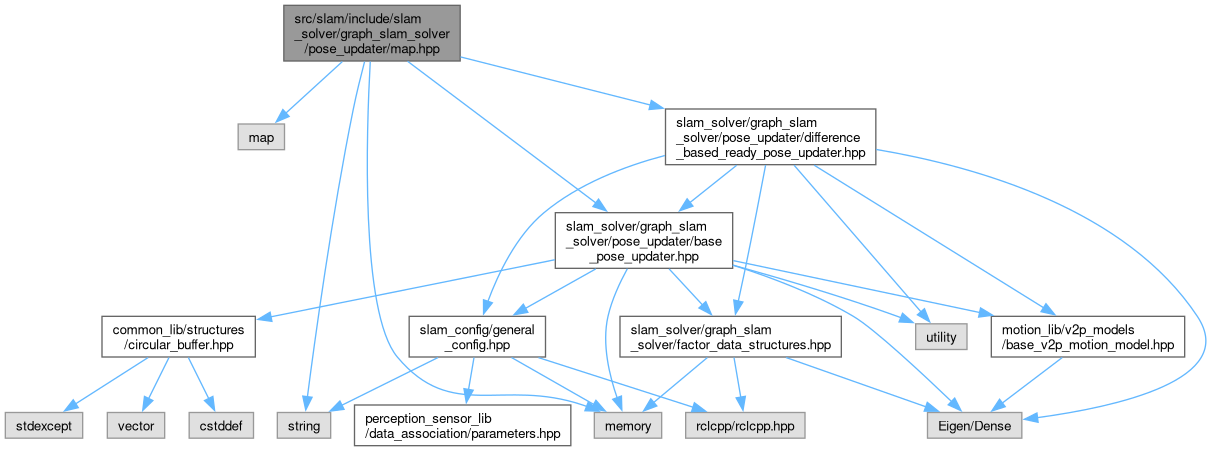
#include <map>#include <memory>#include <string>#include "slam_solver/graph_slam_solver/pose_updater/base_pose_updater.hpp"#include "slam_solver/graph_slam_solver/pose_updater/difference_based_ready_pose_updater.hpp"
Include dependency graph for map.hpp:
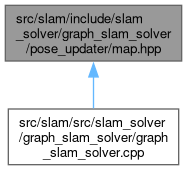
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Variables | |
| const std::map< std::string, std::function< std::shared_ptr< PoseUpdater >(const SLAMParameters &)>, std::less<> > | pose_updater_constructors_map |
Variable Documentation
◆ pose_updater_constructors_map
| const std::map<std::string, std::function<std::shared_ptr<PoseUpdater>(const SLAMParameters&)>, std::less<> > pose_updater_constructors_map |
Initial value:
= {
{"difference_based_ready",
[](const SLAMParameters& params) -> std::shared_ptr<PoseUpdater> {
return std::make_shared<DifferenceBasedReadyPoseUpdater>(params);
}},
{"base_pose_updater",
[](const SLAMParameters& params) -> std::shared_ptr<PoseUpdater> {
return std::make_shared<PoseUpdater>(params);
}},
}