Class to update the pose of the vehicle. More...
#include <base_pose_updater.hpp>

Classes | |
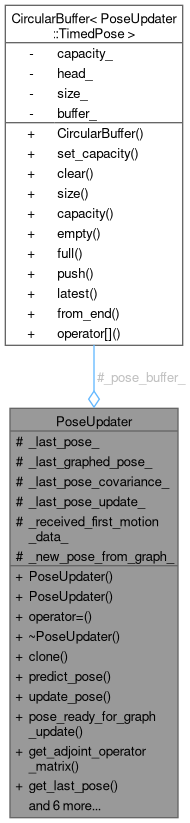
| struct | TimedPose |
Public Member Functions | |
| PoseUpdater (const SLAMParameters ¶ms) | |
| PoseUpdater (const PoseUpdater &other) | |
| PoseUpdater & | operator= (const PoseUpdater &other) |
| virtual | ~PoseUpdater () |
| virtual std::shared_ptr< PoseUpdater > | clone () const |
| Class to update the pose of the vehicle. | |
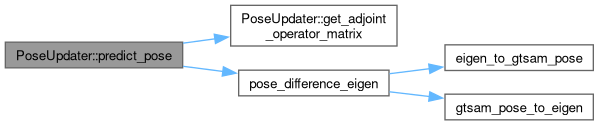
| virtual void | predict_pose (const MotionData &motion_data, std::shared_ptr< V2PMotionModel > motion_model) |
| Updates the last pose and returns the pose difference. | |
| virtual void | update_pose (const Eigen::Vector3d &last_pose) |
| Updates the last pose with the given pose. | |
| virtual bool | pose_ready_for_graph_update () const |
| Check if the pose is ready for graph update. | |
| Eigen::Matrix3d | get_adjoint_operator_matrix (double x_translation, double y_translation, double rotation_angle) const |
| Eigen::Vector3d | get_last_pose () const |
| Eigen::Vector3d | get_last_graphed_pose () const |
| Eigen::Vector3d | get_pose_difference_noise () const |
| rclcpp::Time | get_last_pose_update () const |
| size_t | pose_buffer_size () const |
| size_t | pose_buffer_capacity () const |
| Eigen::Vector3d | get_pose_at_timestamp (const rclcpp::Time ×tamp) const |
Protected Attributes | |
| Eigen::Vector3d | _last_pose_ |
| Eigen::Vector3d | _last_graphed_pose_ |
| Eigen::Matrix3d | _last_pose_covariance_ |
| rclcpp::Time | _last_pose_update_ |
| bool | _received_first_motion_data_ = false |
| bool | _new_pose_from_graph_ = false |
| CircularBuffer< TimedPose > | _pose_buffer_ |
Detailed Description
Class to update the pose of the vehicle.
This class is the one to apply the motion model and keep track of the most up to date pose. It allows for the pose estimate to be calculated independently of the graph optimization, and only update the graph when needed.
Definition at line 18 of file base_pose_updater.hpp.
Constructor & Destructor Documentation
◆ PoseUpdater() [1/2]
|
explicit |
Definition at line 5 of file base_pose_updater.cpp.
◆ PoseUpdater() [2/2]
| PoseUpdater::PoseUpdater | ( | const PoseUpdater & | other | ) |
Definition at line 14 of file base_pose_updater.cpp.
◆ ~PoseUpdater()
|
virtualdefault |
Member Function Documentation
◆ clone()
|
virtual |
Class to update the pose of the vehicle.
This class is the one to apply the motion model and keep track of the most up to date pose. It allows for the pose estimate to be calculated independently of the graph optimization, and only update the graph when needed.
Reimplemented in DifferenceBasedReadyPoseUpdater, and DoublePoseUpdater.
Definition at line 39 of file base_pose_updater.cpp.
◆ get_adjoint_operator_matrix()
| Eigen::Matrix3d PoseUpdater::get_adjoint_operator_matrix | ( | double | x_translation, |
| double | y_translation, | ||
| double | rotation_angle | ||
| ) | const |

◆ get_last_graphed_pose()
|
inline |
Definition at line 82 of file base_pose_updater.hpp.
◆ get_last_pose()
|
inline |
Definition at line 80 of file base_pose_updater.hpp.
◆ get_last_pose_update()
|
inline |
Definition at line 89 of file base_pose_updater.hpp.
◆ get_pose_at_timestamp()
| Eigen::Vector3d PoseUpdater::get_pose_at_timestamp | ( | const rclcpp::Time & | timestamp | ) | const |
Definition at line 43 of file base_pose_updater.cpp.
◆ get_pose_difference_noise()
|
inline |
Definition at line 84 of file base_pose_updater.hpp.
◆ operator=()
| PoseUpdater & PoseUpdater::operator= | ( | const PoseUpdater & | other | ) |

◆ pose_buffer_capacity()
|
inline |
Definition at line 92 of file base_pose_updater.hpp.
◆ pose_buffer_size()
|
inline |
Definition at line 91 of file base_pose_updater.hpp.
◆ pose_ready_for_graph_update()
|
virtual |
Check if the pose is ready for graph update.
- Returns
- true if there is a new pose different from the graph, false otherwise
Reimplemented in DifferenceBasedReadyPoseUpdater.
Definition at line 119 of file base_pose_updater.cpp.
◆ predict_pose()
|
virtual |
Updates the last pose and returns the pose difference.
- Parameters
-
motion_data Motion data containing the velocities and timestamp motion_model Motion model to apply the velocities
Reimplemented in DoublePoseUpdater.
Definition at line 71 of file base_pose_updater.cpp.
◆ update_pose()
|
virtual |
Updates the last pose with the given pose.
This method is used to set the last pose directly, for example after an optimization or when the pose is known from another source. It resets the accumulated pose difference.
- Parameters
-
last_pose The last pose to set
Definition at line 60 of file base_pose_updater.cpp.
Member Data Documentation
◆ _last_graphed_pose_
|
protected |
Definition at line 30 of file base_pose_updater.hpp.
◆ _last_pose_
|
protected |
Definition at line 29 of file base_pose_updater.hpp.
◆ _last_pose_covariance_
|
protected |
Definition at line 31 of file base_pose_updater.hpp.
◆ _last_pose_update_
|
protected |
Definition at line 32 of file base_pose_updater.hpp.
◆ _new_pose_from_graph_
|
protected |
Definition at line 35 of file base_pose_updater.hpp.
◆ _pose_buffer_
|
protected |
Definition at line 37 of file base_pose_updater.hpp.
◆ _received_first_motion_data_
|
protected |
Definition at line 34 of file base_pose_updater.hpp.
The documentation for this class was generated from the following files:
- src/slam/include/slam_solver/graph_slam_solver/pose_updater/base_pose_updater.hpp
- src/slam/src/slam_solver/graph_slam_solver/pose_updater/base_pose_updater.cpp