Loading...
Searching...
No Matches
factor_data_structures.hpp File Reference
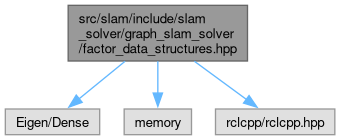
#include <Eigen/Dense>#include <memory>#include <rclcpp/rclcpp.hpp>
Include dependency graph for factor_data_structures.hpp:
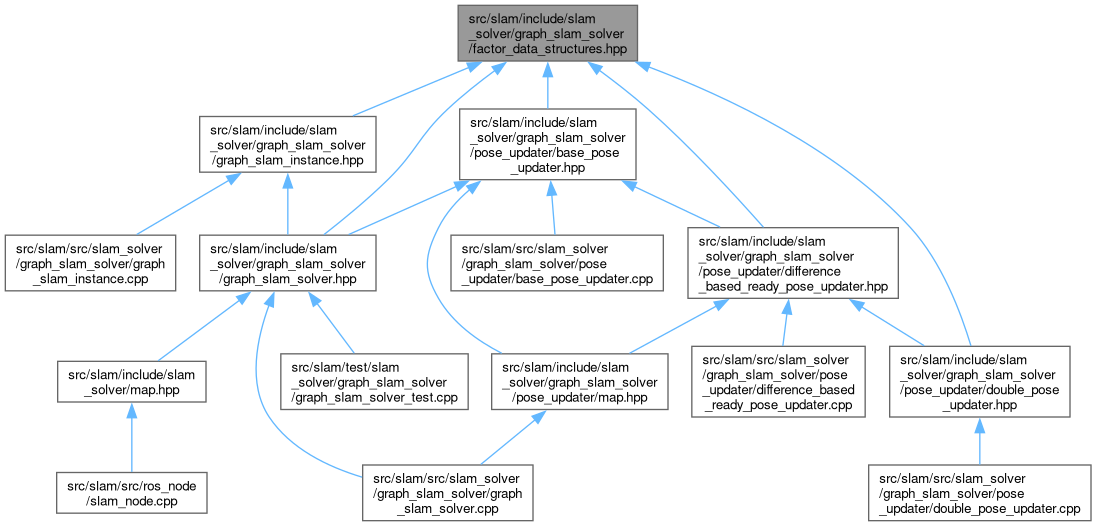
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | MotionData |
| Data structure to hold motion data. More... | |
| struct | ObservationData |
| Struct containing observation data. More... | |
Enumerations | |
| enum class | MotionInputType { VELOCITIES , ODOMETRY } |
| Enum to define the type of motion input. More... | |
Enumeration Type Documentation
◆ MotionInputType
|
strong |
Enum to define the type of motion input.
| Enumerator | |
|---|---|
| VELOCITIES | Vehicle velocities. |
| ODOMETRY | Pose difference from odometry. |
Definition at line 10 of file factor_data_structures.hpp.