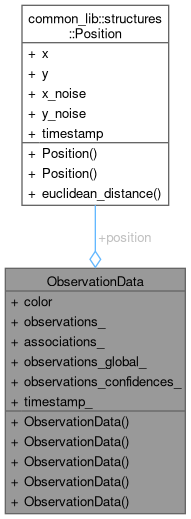
Struct containing observation data. More...
#include <observation_models.hpp>
Public Member Functions | |
| ObservationData () | |
| ObservationData (common_lib::structures::Position position, common_lib::competition_logic::Color color) | |
| ObservationData (double x, double y, common_lib::competition_logic::Color color) | |
| ObservationData ()=default | |
| ObservationData (std::shared_ptr< Eigen::VectorXd > observations, std::shared_ptr< Eigen::VectorXi > associations, std::shared_ptr< Eigen::VectorXd > observations_global, std::shared_ptr< Eigen::VectorXd > observations_confidences, rclcpp::Time timestamp) | |
Public Attributes | |
| common_lib::structures::Position | position |
| common_lib::competition_logic::Color | color |
| std::shared_ptr< Eigen::VectorXd > | observations_ |
| std::shared_ptr< Eigen::VectorXi > | associations_ |
| std::shared_ptr< Eigen::VectorXd > | observations_global_ |
| std::shared_ptr< Eigen::VectorXd > | observations_confidences_ |
| rclcpp::Time | timestamp_ |
Detailed Description
Struct containing observation data.
Data structure to hold observation data.
- Parameters
-
position position of the observed landmark color color of the observed landmark
used to record the cone observations received and to redo their processing after optimization
Definition at line 14 of file observation_models.hpp.
Constructor & Destructor Documentation
◆ ObservationData() [1/5]
|
inline |
Definition at line 17 of file observation_models.hpp.
◆ ObservationData() [2/5]
|
inline |
Definition at line 18 of file observation_models.hpp.
◆ ObservationData() [3/5]
|
inline |
Definition at line 21 of file observation_models.hpp.
◆ ObservationData() [4/5]
|
default |
◆ ObservationData() [5/5]
|
inline |
Definition at line 48 of file factor_data_structures.hpp.
Member Data Documentation
◆ associations_
| std::shared_ptr<Eigen::VectorXi> ObservationData::associations_ |
Definition at line 42 of file factor_data_structures.hpp.
◆ color
| common_lib::competition_logic::Color ObservationData::color |
Definition at line 16 of file observation_models.hpp.
◆ observations_
| std::shared_ptr<Eigen::VectorXd> ObservationData::observations_ |
Definition at line 41 of file factor_data_structures.hpp.
◆ observations_confidences_
| std::shared_ptr<Eigen::VectorXd> ObservationData::observations_confidences_ |
Definition at line 44 of file factor_data_structures.hpp.
◆ observations_global_
| std::shared_ptr<Eigen::VectorXd> ObservationData::observations_global_ |
Definition at line 43 of file factor_data_structures.hpp.
◆ position
| common_lib::structures::Position ObservationData::position |
Definition at line 15 of file observation_models.hpp.
◆ timestamp_
| rclcpp::Time ObservationData::timestamp_ |
Definition at line 45 of file factor_data_structures.hpp.
The documentation for this struct was generated from the following files:
- src/ekf_state_est/include/kalman_filter/observation_models.hpp
- src/slam/include/slam_solver/graph_slam_solver/factor_data_structures.hpp