Loading...
Searching...
No Matches
planning_config.hpp File Reference
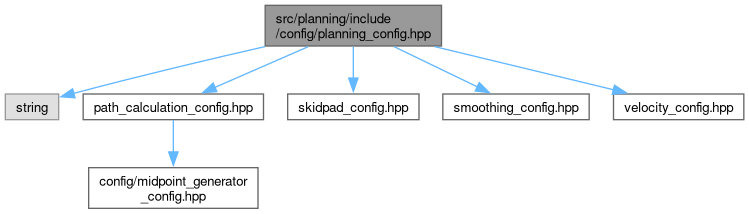
#include <string>#include "path_calculation_config.hpp"#include "skidpad_config.hpp"#include "smoothing_config.hpp"#include "velocity_config.hpp"
Include dependency graph for planning_config.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | PlanningParameters |
| struct | PlanningConfig |