#include "ground_removal/ransac.hpp"#include <gtest/gtest.h>#include <memory>#include <test_utils/pointcloud2_helper.hpp>#include <utils/plane.hpp>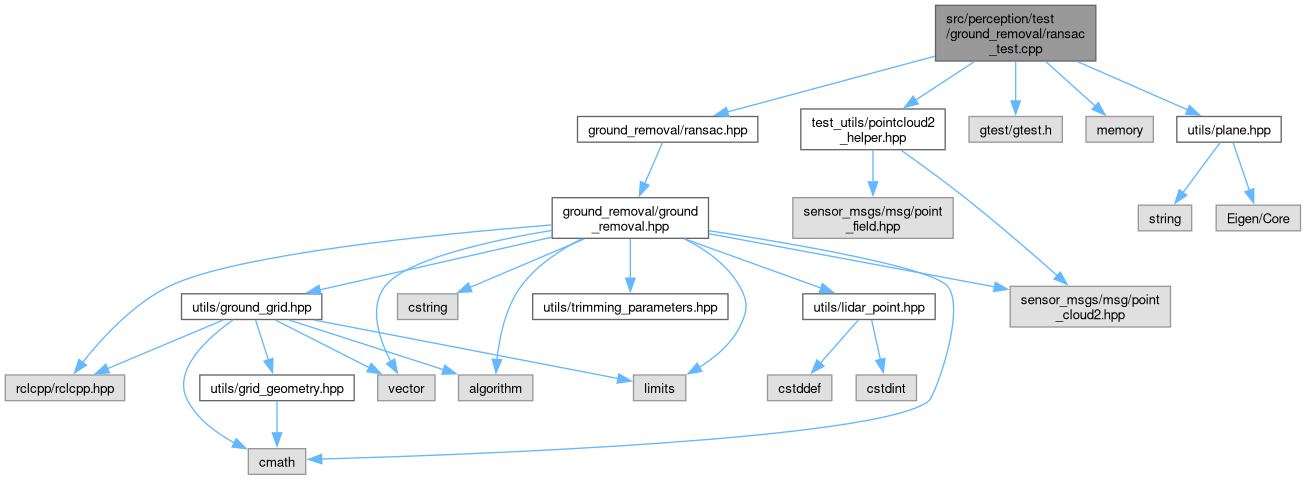
Go to the source code of this file.
Classes | |
| class | RANSACTest |
| Test class for setting up data and testing RANSAC algorithm. More... | |
Functions | |
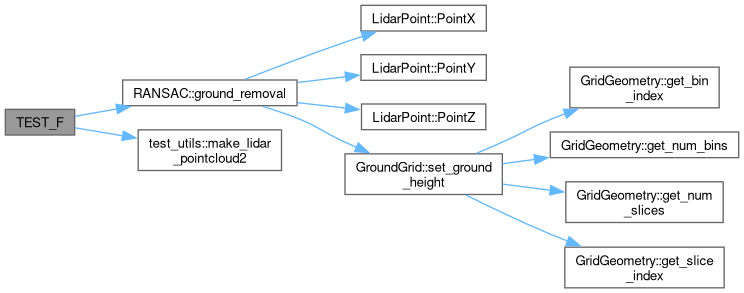
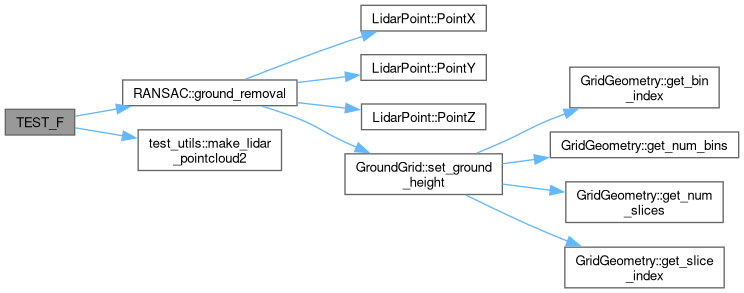
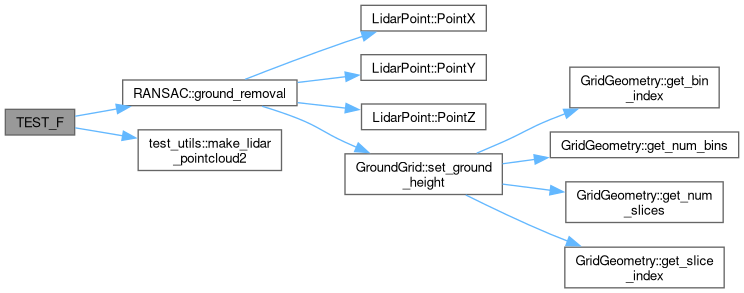
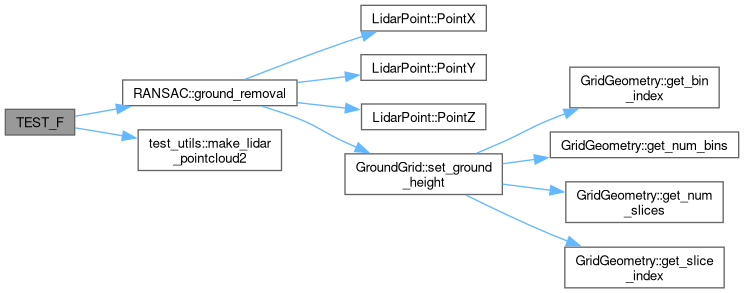
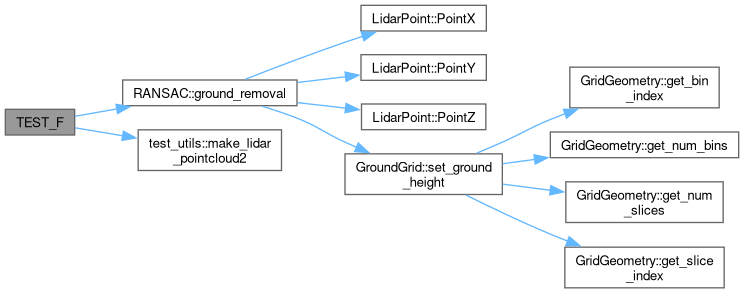
| TEST_F (RANSACTest, TestBigEpsilon) | |
| Test Scenario: All points fit in the model. | |
| TEST_F (RANSACTest, TestCommonScenario) | |
| Test Scenario: Only points that fit into the plane are considered as part of the plane. | |
| TEST_F (RANSACTest, TestCommonScenario2) | |
| Test Scenario: The points in the plane and a close enough point is removed - 1 point left. | |
| TEST_F (RANSACTest, TestThresholdZero) | |
| Test Scenario: The epsilon threshold is set to 0 - No points are removed. | |
| TEST_F (RANSACTest, TestZeroRepetitions) | |
| Test Scenario: Number of repetitions is set to 0 - Expected a point cloud with 0 points. | |
| TEST_F (RANSACTest, TestSmallEpsilon) | |
| Test Scenario: Really small threshold. | |
| TEST_F (RANSACTest, TestBigEpsilon2) | |
| Test Scenario: Really great threshold - All points are considered as part of the plane. | |
| TEST_F (RANSACTest, TestCommonScenario3Points) | |
| Test Scenario: Point cloud with only 3 points: 0 points are expected after the ground removal. | |
| TEST_F (RANSACTest, Test3PointsThresholdZero) | |
| Test Scenario: Point cloud with only 3 points: The epsilon threshold is set to 0 - No points are removed. | |
| TEST_F (RANSACTest, TestEmptyPointCloud) | |
| Test Scenario: Point cloud with 0 points - Must return a point cloud with 0 points also. | |
| TEST_F (RANSACTest, TestEmptyPointCloud2) | |
| Test Scenario: Point cloud with 0 points. | |
Function Documentation
◆ TEST_F() [1/11]
| TEST_F | ( | RANSACTest | , |
| Test3PointsThresholdZero | |||
| ) |
Test Scenario: Point cloud with only 3 points: The epsilon threshold is set to 0 - No points are removed.
Definition at line 135 of file ransac_test.cpp.
◆ TEST_F() [2/11]
| TEST_F | ( | RANSACTest | , |
| TestBigEpsilon | |||
| ) |
Test Scenario: All points fit in the model.
Definition at line 36 of file ransac_test.cpp.
◆ TEST_F() [3/11]
| TEST_F | ( | RANSACTest | , |
| TestBigEpsilon2 | |||
| ) |
Test Scenario: Really great threshold - All points are considered as part of the plane.
Definition at line 109 of file ransac_test.cpp.
◆ TEST_F() [4/11]
| TEST_F | ( | RANSACTest | , |
| TestCommonScenario | |||
| ) |
Test Scenario: Only points that fit into the plane are considered as part of the plane.
Definition at line 48 of file ransac_test.cpp.
◆ TEST_F() [5/11]
| TEST_F | ( | RANSACTest | , |
| TestCommonScenario2 | |||
| ) |
Test Scenario: The points in the plane and a close enough point is removed - 1 point left.
Definition at line 60 of file ransac_test.cpp.
◆ TEST_F() [6/11]
| TEST_F | ( | RANSACTest | , |
| TestCommonScenario3Points | |||
| ) |
Test Scenario: Point cloud with only 3 points: 0 points are expected after the ground removal.
Definition at line 122 of file ransac_test.cpp.
◆ TEST_F() [7/11]
| TEST_F | ( | RANSACTest | , |
| TestEmptyPointCloud | |||
| ) |
Test Scenario: Point cloud with 0 points - Must return a point cloud with 0 points also.
Definition at line 147 of file ransac_test.cpp.
◆ TEST_F() [8/11]
| TEST_F | ( | RANSACTest | , |
| TestEmptyPointCloud2 | |||
| ) |
Test Scenario: Point cloud with 0 points.
Epsilon and repetitions set to 0 - Expected 0 points.
Definition at line 160 of file ransac_test.cpp.
◆ TEST_F() [9/11]
| TEST_F | ( | RANSACTest | , |
| TestSmallEpsilon | |||
| ) |
Test Scenario: Really small threshold.
Only the points of the plane are considered as part of the ground.
Definition at line 97 of file ransac_test.cpp.
◆ TEST_F() [10/11]
| TEST_F | ( | RANSACTest | , |
| TestThresholdZero | |||
| ) |
Test Scenario: The epsilon threshold is set to 0 - No points are removed.
Definition at line 72 of file ransac_test.cpp.
◆ TEST_F() [11/11]
| TEST_F | ( | RANSACTest | , |
| TestZeroRepetitions | |||
| ) |
Test Scenario: Number of repetitions is set to 0 - Expected a point cloud with 0 points.
Definition at line 84 of file ransac_test.cpp.