Ground removal using the RANSAC algorithm. More...
#include <ransac.hpp>
Public Member Functions | |
| RANSAC (const double epsilon, const int n_tries) | |
| Constructor for the RANSAC ground removal algorithm. | |
| RANSAC ()=default | |
| Default constructor. | |
| void | ground_removal (const sensor_msgs::msg::PointCloud2::SharedPtr &trimmed_point_cloud, sensor_msgs::msg::PointCloud2::SharedPtr &ground_removed_point_cloud, GroundGrid &ground_grid) const override |
| Perform ground removal using the RANSAC algorithm. | |
Private Attributes | |
| double | epsilon |
| Epsilon threshold for ground removal. | |
| int | n_tries |
| Number of RANSAC iterations. | |
Detailed Description
Ground removal using the RANSAC algorithm.
This class implements the GroundRemoval interface and performs ground removal on a point cloud using the Random Sample Consensus (RANSAC) algorithm.
Definition at line 12 of file ransac.hpp.
Constructor & Destructor Documentation
◆ RANSAC() [1/2]
| RANSAC::RANSAC | ( | const double | epsilon, |
| const int | n_tries | ||
| ) |
Constructor for the RANSAC ground removal algorithm.
- Parameters
-
epsilon Epsilon threshold for ground removal. n_tries Number of RANSAC iterations.
Definition at line 6 of file ransac.cpp.
◆ RANSAC() [2/2]
|
default |
Default constructor.
This constructor is provided as a default constructor.
Member Function Documentation
◆ ground_removal()
|
overridevirtual |
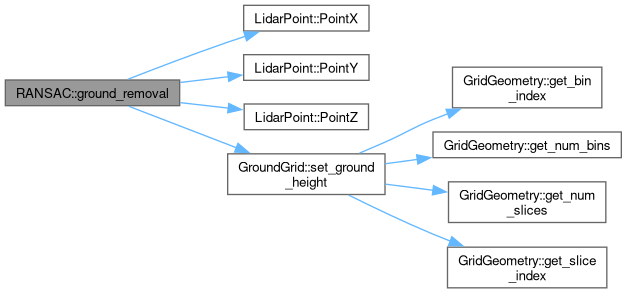
Perform ground removal using the RANSAC algorithm.
This function implements the ground removal using the RANSAC algorithm on the provided point cloud.
- Parameters
-
point_cloud The input point cloud to be processed. ground_removed_point_cloud The resulting point cloud after ground removal. ground_grid The ground grid to be updated during ground removal.
Implements GroundRemoval.
Definition at line 8 of file ransac.cpp.
Member Data Documentation
◆ epsilon
|
private |
Epsilon threshold for ground removal.
Definition at line 43 of file ransac.hpp.
◆ n_tries
|
private |
Number of RANSAC iterations.
Definition at line 44 of file ransac.hpp.
The documentation for this class was generated from the following files:
- src/perception/include/ground_removal/ransac.hpp
- src/perception/src/ground_removal/ransac.cpp