Loading...
Searching...
No Matches
GroundGrid Class Reference
Class to represent a ground height grid for ground proximity checks. More...
#include <ground_grid.hpp>
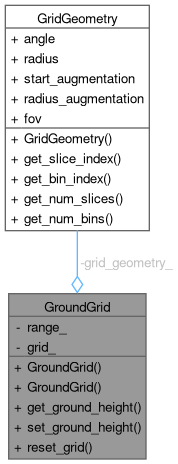
Collaboration diagram for GroundGrid:
Public Member Functions | |
| GroundGrid ()=default | |
| GroundGrid (const double range, const double angle, const double radius, const double start_augmentation, const double radius_augmentation, const double fov) | |
| Constructor for GroundGrid. | |
| float | get_ground_height (const float x, const float y) const |
| Get the ground height at a specific (x, y) location. | |
| void | set_ground_height (const float x, const float y, const float height) |
| Set the ground height at a specific (x, y) location. | |
| void | reset_grid () |
| Reset the ground grid to initial state. | |
Private Attributes | |
| double | range_ |
| GridGeometry | grid_geometry_ |
| std::vector< std::vector< float > > | grid_ |
Detailed Description
Class to represent a ground height grid for ground proximity checks.
Definition at line 16 of file ground_grid.hpp.
Constructor & Destructor Documentation
◆ GroundGrid() [1/2]
|
default |
◆ GroundGrid() [2/2]
| GroundGrid::GroundGrid | ( | const double | range, |
| const double | angle, | ||
| const double | radius, | ||
| const double | start_augmentation, | ||
| const double | radius_augmentation, | ||
| const double | fov | ||
| ) |
Constructor for GroundGrid.
- Parameters
-
range Maximum range of the grid angle Angular resolution radius Base radial bin size start_augmentation Distance at which augmentation starts radius_augmentation Bin size increase per bin fov Field of view
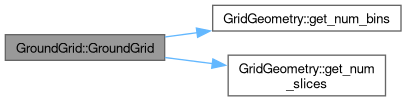
Definition at line 3 of file ground_grid.cpp.
Here is the call graph for this function:
Member Function Documentation
◆ get_ground_height()
| float GroundGrid::get_ground_height | ( | const float | x, |
| const float | y | ||
| ) | const |
Get the ground height at a specific (x, y) location.
- Parameters
-
x X coordinate y Y coordinate
- Returns
- Ground height (float), or NaN if no data
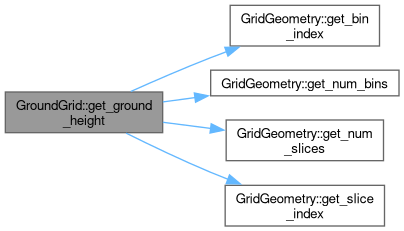
Definition at line 12 of file ground_grid.cpp.
Here is the call graph for this function:
Here is the caller graph for this function:

◆ reset_grid()
| void GroundGrid::reset_grid | ( | ) |
Reset the ground grid to initial state.
Definition at line 43 of file ground_grid.cpp.
Here is the caller graph for this function:

◆ set_ground_height()
| void GroundGrid::set_ground_height | ( | const float | x, |
| const float | y, | ||
| const float | height | ||
| ) |
Set the ground height at a specific (x, y) location.
- Parameters
-
x X coordinate y Y coordinate height Ground height to set
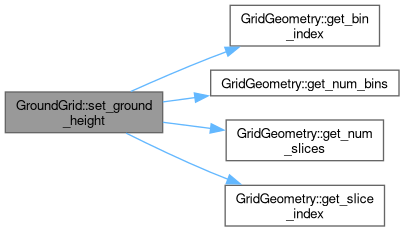
Definition at line 25 of file ground_grid.cpp.
Here is the call graph for this function:
Here is the caller graph for this function:
Member Data Documentation
◆ grid_
|
private |
Definition at line 57 of file ground_grid.hpp.
◆ grid_geometry_
|
private |
Definition at line 56 of file ground_grid.hpp.
◆ range_
|
private |
Definition at line 55 of file ground_grid.hpp.
The documentation for this class was generated from the following files:
- src/perception/include/utils/ground_grid.hpp
- src/perception/src/utils/ground_grid.cpp