Loading...
Searching...
No Matches
GroundRemoval Class Referenceabstract
Abstract class for ground removal from a point cloud. More...
#include <ground_removal.hpp>
Inheritance diagram for GroundRemoval:
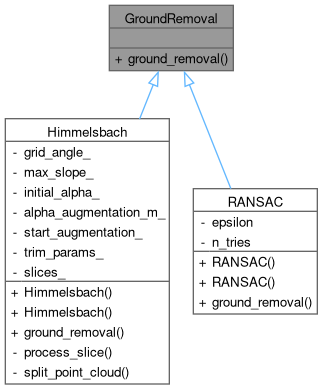
Collaboration diagram for GroundRemoval:
Public Member Functions | |
| virtual void | ground_removal (const sensor_msgs::msg::PointCloud2::SharedPtr &trimmed_point_cloud, sensor_msgs::msg::PointCloud2::SharedPtr &ground_removed_point_cloud, GroundGrid &ground_grid) const =0 |
| Perform ground removal on the input point cloud. | |
Detailed Description
Abstract class for ground removal from a point cloud.
This class defines an interface for ground removal algorithms from a point cloud. Inherit from this class to implement specific ground removal algorithms.
Definition at line 23 of file ground_removal.hpp.
Member Function Documentation
◆ ground_removal()
|
pure virtual |
Perform ground removal on the input point cloud.
This pure virtual function must be implemented by derived classes.
- Parameters
-
point_cloud The input point cloud to be processed. ground_removed_point_cloud The resulting point cloud after ground removal. ground_grid The ground grid to be updated during ground removal.
Implemented in Himmelsbach, and RANSAC.
The documentation for this class was generated from the following file:
- src/perception/include/ground_removal/ground_removal.hpp