Loading...
Searching...
No Matches
MockDataAssociationModel Class Reference
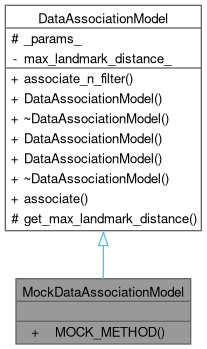
Inheritance diagram for MockDataAssociationModel:
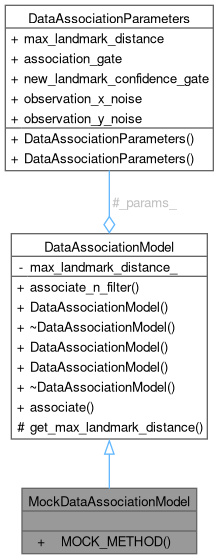
Collaboration diagram for MockDataAssociationModel:
Public Member Functions | |
| MOCK_METHOD (Eigen::VectorXi, associate,(const Eigen::VectorXd &state, const Eigen::VectorXd &observations, const Eigen::MatrixXd &covariance, const Eigen::VectorXd &observation_confidences),(const, override)) | |
 Public Member Functions inherited from DataAssociationModel Public Member Functions inherited from DataAssociationModel | |
| virtual int | associate_n_filter (const std::vector< common_lib::structures::Cone > &perception_map, Eigen::VectorXf &_x_vector_, Eigen::MatrixXf &_p_matrix_, std::vector< int > &matched_ids, std::vector< Eigen::Vector2f > &matched_cone_positions, std::vector< Eigen::Vector2f > &new_features, ObservationModel *observation_model) const =0 |
| Associate the observed landmarks to the expected landmarks and update the state vector and the covariance matrix. | |
| DataAssociationModel (float max_landmark_distance) | |
| virtual | ~DataAssociationModel ()=default |
| DataAssociationModel ()=default | |
| DataAssociationModel (DataAssociationParameters params) | |
| virtual | ~DataAssociationModel ()=default |
| virtual Eigen::VectorXi | associate (const Eigen::VectorXd &landmarks, const Eigen::VectorXd &observations, const Eigen::MatrixXd &covariance, const Eigen::VectorXd &observation_confidences) const =0 |
| This function associates the landmarks with the observations. | |
Additional Inherited Members | |
| Protected Member Functions inherited from DataAssociationModel | |
| float | get_max_landmark_distance () const |
| Protected Attributes inherited from DataAssociationModel | |
| DataAssociationParameters | _params_ |
Detailed Description
Definition at line 7 of file graph_slam_solver_test.cpp.
Member Function Documentation
◆ MOCK_METHOD()
| MockDataAssociationModel::MOCK_METHOD | ( | Eigen::VectorXi | , |
| associate | , | ||
| (const Eigen::VectorXd &state, const Eigen::VectorXd &observations, const Eigen::MatrixXd &covariance, const Eigen::VectorXd &observation_confidences) | , | ||
| (const, override) | |||
| ) |
The documentation for this class was generated from the following file:
- src/slam/test/slam_solver/graph_slam_solver/graph_slam_solver_test.cpp