Observation Model class compiled of functions for observation model. More...
#include <observation_models.hpp>
Public Member Functions | |
| ObservationModel (const Eigen::MatrixXf &observation_noise_covariance_matrix) | |
| Construct a new Observation Model object. | |
| Eigen::Vector2f | observation_model (const Eigen::VectorXf &expected_state, const unsigned int landmark_index) const |
| Calculate expected observation from the state vector. | |
| Eigen::VectorXf | observation_model_n_landmarks (const Eigen::VectorXf ¤t_state, const std::vector< int > &matched_ids) const |
| Eigen::VectorXf | format_observation (const std::vector< Eigen::Vector2f > &observations) const |
| Eigen::MatrixXf | get_jacobian_of_observation_model (const Eigen::VectorXf ¤t_state, const std::vector< int > &matched_ids) const |
| Eigen::MatrixXf | get_full_observation_noise_covariance_matrix (const int observation_size) const |
| Eigen::Vector2f | inverse_observation_model (const Eigen::VectorXf &expected_state, const ObservationData &observation_data) const |
| Calculate landmark position from observation. | |
| Eigen::MatrixXf | get_gv (const Eigen::VectorXf &expected_state, const ObservationData &observation_data) const |
| Eigen::MatrixXf | get_gz (const Eigen::VectorXf &expected_state, const ObservationData &observation_data) const |
| Eigen::MatrixXf | get_state_to_observation_matrix (const Eigen::VectorXf &expected_state, const unsigned int landmark_index, const unsigned int state_size) const |
| Get the state to observation matrix of the observation model (H in LaTeX documentation) | |
| Eigen::MatrixXf | get_observation_noise_covariance_matrix () const |
| Get the observation noise covariance matrix (C or H) | |
Static Public Member Functions | |
| static Eigen::MatrixXf | create_observation_noise_covariance_matrix (float noise_value) |
| Create a Q matrix from a given noise value. | |
Private Attributes | |
| Eigen::MatrixXf | _observation_noise_covariance_matrix_ |
| H or C. | |
Detailed Description
Observation Model class compiled of functions for observation model.
Definition at line 29 of file observation_models.hpp.
Constructor & Destructor Documentation
◆ ObservationModel()
|
explicit |
Construct a new Observation Model object.
- Parameters
-
observation_noise_covariance_matrix covariance matrix of the observation noise (Q)
Definition at line 5 of file observation_models.cpp.
Member Function Documentation
◆ create_observation_noise_covariance_matrix()
|
static |
Create a Q matrix from a given noise value.
- Returns
- Eigen::Matrix2f
Definition at line 215 of file observation_models.cpp.

◆ format_observation()
| Eigen::VectorXf ObservationModel::format_observation | ( | const std::vector< Eigen::Vector2f > & | observations | ) | const |
Definition at line 79 of file observation_models.cpp.
◆ get_full_observation_noise_covariance_matrix()
| Eigen::MatrixXf ObservationModel::get_full_observation_noise_covariance_matrix | ( | const int | observation_size | ) | const |

◆ get_gv()
| Eigen::MatrixXf ObservationModel::get_gv | ( | const Eigen::VectorXf & | expected_state, |
| const ObservationData & | observation_data | ||
| ) | const |
Definition at line 32 of file observation_models.cpp.
◆ get_gz()
| Eigen::MatrixXf ObservationModel::get_gz | ( | const Eigen::VectorXf & | expected_state, |
| const ObservationData & | observation_data | ||
| ) | const |
Definition at line 46 of file observation_models.cpp.
◆ get_jacobian_of_observation_model()
| Eigen::MatrixXf ObservationModel::get_jacobian_of_observation_model | ( | const Eigen::VectorXf & | current_state, |
| const std::vector< int > & | matched_ids | ||
| ) | const |
Definition at line 117 of file observation_models.cpp.
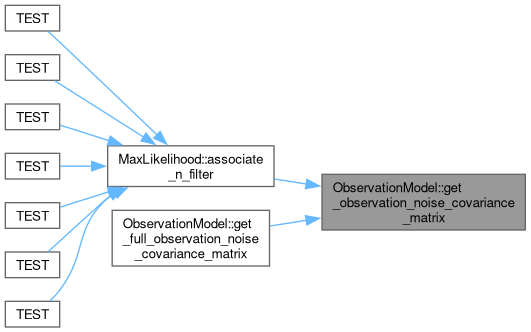
◆ get_observation_noise_covariance_matrix()
| Eigen::MatrixXf ObservationModel::get_observation_noise_covariance_matrix | ( | ) | const |
Get the observation noise covariance matrix (C or H)
- Returns
- Eigen::MatrixXf
Definition at line 205 of file observation_models.cpp.
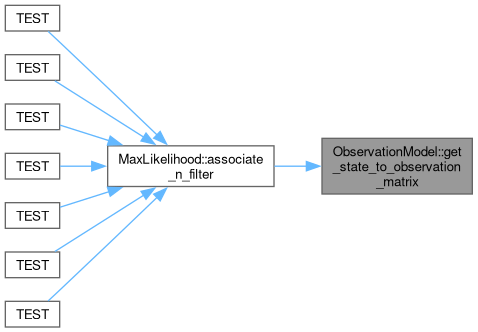
◆ get_state_to_observation_matrix()
| Eigen::MatrixXf ObservationModel::get_state_to_observation_matrix | ( | const Eigen::VectorXf & | expected_state, |
| const unsigned int | landmark_index, | ||
| const unsigned int | state_size | ||
| ) | const |
Get the state to observation matrix of the observation model (H in LaTeX documentation)
- Parameters
-
landmark_index index of the x variable of the landmark in the state vector state_size size of the state vector
- Returns
- Eigen::MatrixXf
Definition at line 148 of file observation_models.cpp.
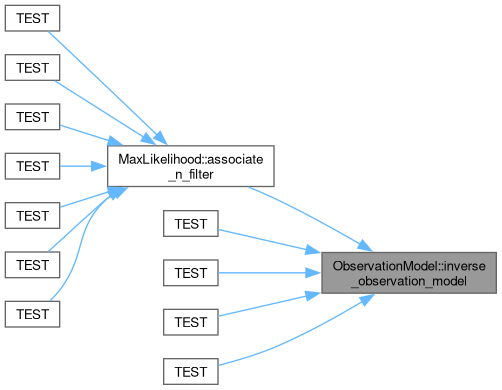
◆ inverse_observation_model()
| Eigen::Vector2f ObservationModel::inverse_observation_model | ( | const Eigen::VectorXf & | expected_state, |
| const ObservationData & | observation_data | ||
| ) | const |
Calculate landmark position from observation.
Translates from the car's frame to the map frame.
- Parameters
-
expected_state observation_data
- Returns
- Eigen::Vector2f
Definition at line 8 of file observation_models.cpp.
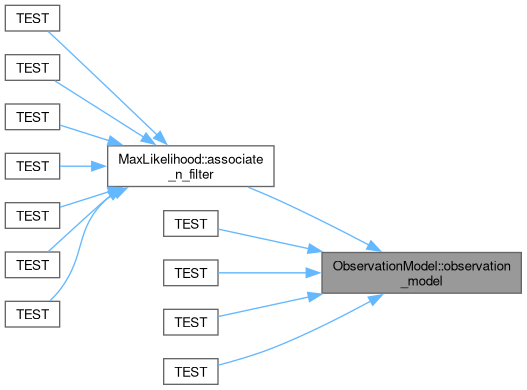
◆ observation_model()
| Eigen::Vector2f ObservationModel::observation_model | ( | const Eigen::VectorXf & | expected_state, |
| const unsigned int | landmark_index | ||
| ) | const |
Calculate expected observation from the state vector.
Correponds to h in LaTeX documentation.
- Parameters
-
expected_state landmark_index index of the x variable of the landmark in the state vector
- Returns
- Eigen::Vector2f
Definition at line 56 of file observation_models.cpp.
◆ observation_model_n_landmarks()
| Eigen::VectorXf ObservationModel::observation_model_n_landmarks | ( | const Eigen::VectorXf & | current_state, |
| const std::vector< int > & | matched_ids | ||
| ) | const |
Definition at line 89 of file observation_models.cpp.
Member Data Documentation
◆ _observation_noise_covariance_matrix_
|
private |
H or C.
Definition at line 30 of file observation_models.hpp.
The documentation for this class was generated from the following files:
- src/ekf_state_est/include/kalman_filter/observation_models.hpp
- src/ekf_state_est/src/kalman_filter/observation_models.cpp