Loading...
Searching...
No Matches
#include <eigen3/Eigen/Dense>#include <functional>#include <map>#include <memory>#include <rclcpp/rclcpp.hpp>#include <typeinfo>
Include dependency graph for motion_models.hpp:

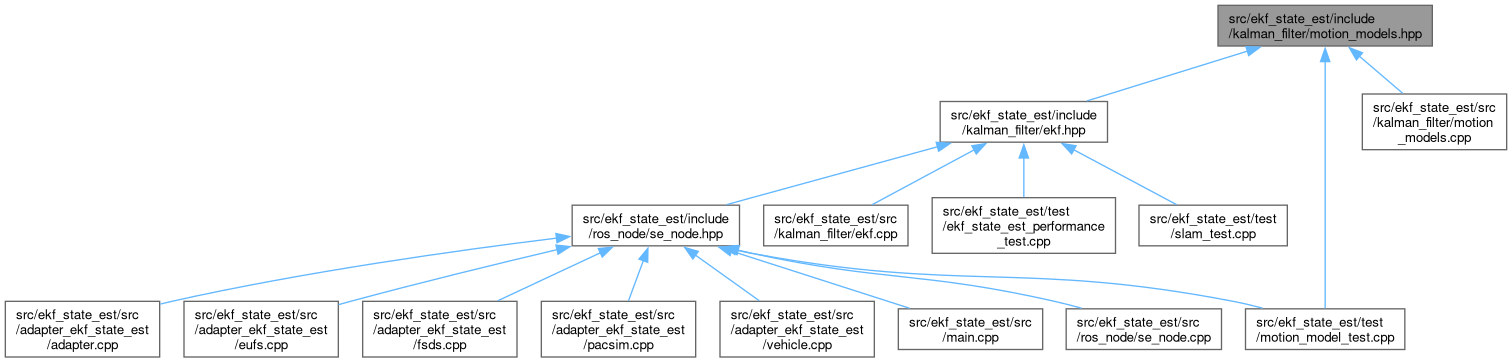
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | MotionUpdate |
| Struct for data retrieved by the IMU. More... | |
| class | MotionModel |
| Abstract Moiton Model class designed to be implemented by the different motion models. More... | |
| class | ImuVelocityModel |
| Motion estimation that uses the specific values of the x and y axis accelerations, being the angle of the vehicle and its position independent. More... | |
| class | NormalVelocityModel |
| Motion estimation that uses the module of the velocity and the rotational velocity. More... | |
Variables | |
| const std::map< std::string, std::function< std::shared_ptr< MotionModel >(const Eigen::MatrixXf &)>, std::less<> > | motion_model_constructors |
| Map object to map strings from launch file parameter to constructor. | |
Variable Documentation
◆ motion_model_constructors
| const std::map<std::string, std::function<std::shared_ptr<MotionModel>(const Eigen::MatrixXf &)>, std::less<> > motion_model_constructors |
Initial value:
= {
{"normal_velocity_model",
[](const Eigen::MatrixXf &process_noise_covariance_matrix)
-> std::shared_ptr<MotionModel> {
return std::make_shared<NormalVelocityModel>(process_noise_covariance_matrix);
}},
{"imu_velocity_model",
[](const Eigen::MatrixXf &process_noise_covariance_matrix)
-> std::shared_ptr<MotionModel> {
return std::make_shared<ImuVelocityModel>(process_noise_covariance_matrix);
}}}
Map object to map strings from launch file parameter to constructor.
Definition at line 185 of file motion_models.hpp.