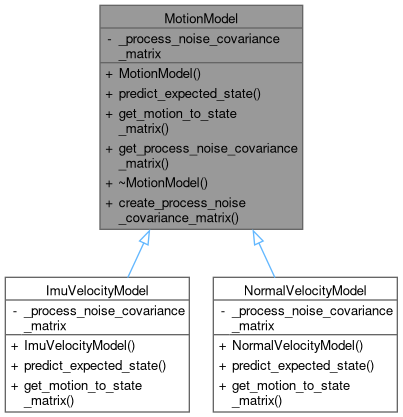
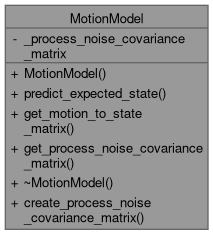
Abstract Moiton Model class designed to be implemented by the different motion models. More...
#include <motion_models.hpp>
Public Member Functions | |
| MotionModel (const Eigen::MatrixXf &process_noise_covariance_matrix) | |
| Construct a new Motion Model object. | |
| virtual Eigen::VectorXf | predict_expected_state (const Eigen::VectorXf &expected_state, const MotionUpdate &motion_prediction_data, const double time_interval) const =0 |
| Calculate expected state vector from motion estimation. | |
| virtual Eigen::MatrixXf | get_motion_to_state_matrix (const Eigen::VectorXf &expected_state, const MotionUpdate &motion_prediction_data, const double time_interval) const =0 |
| Calculate state covariance matrix from motion estimation. | |
| Eigen::MatrixXf | get_process_noise_covariance_matrix (const unsigned int state_size) const |
| Get the process noise covariance matrix object. | |
| virtual | ~MotionModel ()=default |
Static Public Member Functions | |
| static Eigen::MatrixXf | create_process_noise_covariance_matrix (float process_noise) |
Private Attributes | |
| Eigen::MatrixXf | _process_noise_covariance_matrix |
| R. | |
Detailed Description
Abstract Moiton Model class designed to be implemented by the different motion models.
Definition at line 34 of file motion_models.hpp.
Constructor & Destructor Documentation
◆ MotionModel()
|
explicit |
Construct a new Motion Model object.
- Parameters
-
process_noise_covariance_matrix covariance matrix of the process noise (R)
Definition at line 5 of file motion_models.cpp.
◆ ~MotionModel()
|
virtualdefault |
Member Function Documentation
◆ create_process_noise_covariance_matrix()
|
static |

◆ get_motion_to_state_matrix()
|
pure virtual |
Calculate state covariance matrix from motion estimation.
Corresponds to G in documentation
- Parameters
-
expected_state motion_prediction_data time_interval in seconds
- Returns
- Eigen::MatrixXf
Implemented in ImuVelocityModel, and NormalVelocityModel.
◆ get_process_noise_covariance_matrix()
| Eigen::MatrixXf MotionModel::get_process_noise_covariance_matrix | ( | const unsigned int | state_size | ) | const |
Get the process noise covariance matrix object.
- Parameters
-
state_size
- Returns
- Eigen::MatrixXf
Definition at line 14 of file motion_models.cpp.
◆ predict_expected_state()
|
pure virtual |
Calculate expected state vector from motion estimation.
Corresponds to g in documentation
- Parameters
-
expected_state motion_prediction_data time_interval in seconds
- Returns
- Eigen::VectorXf
Implemented in ImuVelocityModel, and NormalVelocityModel.
Member Data Documentation
◆ _process_noise_covariance_matrix
|
private |
R.
Definition at line 35 of file motion_models.hpp.
The documentation for this class was generated from the following files:
- src/ekf_state_est/include/kalman_filter/motion_models.hpp
- src/ekf_state_est/src/kalman_filter/motion_models.cpp