Validates clusters using a cylinder approximation. More...
#include <cylinder_validator.hpp>
Public Member Functions | |
| CylinderValidator (double small_width, double small_height, double large_width, double large_height, double out_distance_cap) | |
| Constructs a new CylinderValidator object with specified width and height. | |
| double | small_getRadius () const |
| Gets the radius of the cylinder for small cones. | |
| double | large_getRadius () const |
| Gets the radius of the cylinder for large cones. | |
| std::vector< double > | coneValidator (Cluster *cone_point_cloud, Plane &plane) const override |
| Validates a cluster using cylinder approximation. | |
Private Attributes | |
| double | small_width |
| Width of the cylinder for a small cone. | |
| double | small_height |
| Height of the cylinder for a small cone. | |
| double | large_width |
| Width of the cylinder for a large cone. | |
| double | large_height |
| Height of the cylinder for a large cone. | |
| double | out_distance_cap |
| Minimum out_distance value for it to be 0. | |
Detailed Description
Validates clusters using a cylinder approximation.
The CylinderValidator class inherits from the ConeValidator class and implements cluster validation using a cylinder approximation. It provides methods to set and retrieve cylinder dimensions and to perform validation of clusters.
Definition at line 13 of file cylinder_validator.hpp.
Constructor & Destructor Documentation
◆ CylinderValidator()
| CylinderValidator::CylinderValidator | ( | double | small_width, |
| double | small_height, | ||
| double | large_width, | ||
| double | large_height, | ||
| double | out_distance_cap | ||
| ) |
Constructs a new CylinderValidator object with specified width and height.
- Parameters
-
small_width The width of the cylinder for a small cone. small_height The height of the cylinder for a small cone. large_width The width of the cylinder for a large cone. large_height The height of the cylinder for a large cone. out_distance_cap Minimum out_distance value for a cluster to have a 0 result.
Definition at line 3 of file cylinder_validator.cpp.
Member Function Documentation
◆ coneValidator()
|
overridevirtual |
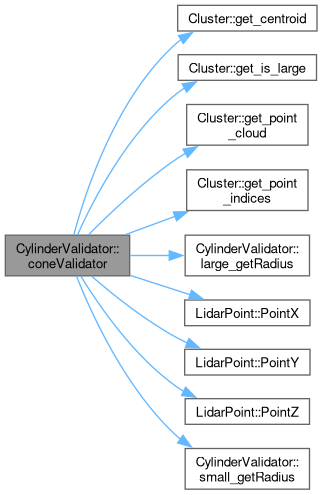
Validates a cluster using cylinder approximation.
- Parameters
-
cone_point_cloud Pointer to the cluster to be validated.
- Returns
- Vector containing:
Index 0 -> Ratio of between distance to the farthest point and the cylinder radius.| Index 1 -> Ratio of between distance to the farthest point and the cylinder heigth.| Index 2 -> Ratio between the number of points outside the cylinder and the total.
Implements ConeValidator.
Definition at line 15 of file cylinder_validator.cpp.
◆ large_getRadius()
| double CylinderValidator::large_getRadius | ( | ) | const |
Gets the radius of the cylinder for large cones.
- Returns
- The radius of the cylinder for large cones.
Definition at line 13 of file cylinder_validator.cpp.
◆ small_getRadius()
| double CylinderValidator::small_getRadius | ( | ) | const |
Gets the radius of the cylinder for small cones.
- Returns
- The radius of the cylinder for small cones.
Definition at line 11 of file cylinder_validator.cpp.
Member Data Documentation
◆ large_height
|
private |
Height of the cylinder for a large cone.
Definition at line 52 of file cylinder_validator.hpp.
◆ large_width
|
private |
Width of the cylinder for a large cone.
Definition at line 51 of file cylinder_validator.hpp.
◆ out_distance_cap
|
private |
Minimum out_distance value for it to be 0.
Definition at line 53 of file cylinder_validator.hpp.
◆ small_height
|
private |
Height of the cylinder for a small cone.
Definition at line 50 of file cylinder_validator.hpp.
◆ small_width
|
private |
Width of the cylinder for a small cone.
Definition at line 49 of file cylinder_validator.hpp.
The documentation for this class was generated from the following files:
- src/perception/include/cone_validator/cylinder_validator.hpp
- src/perception/src/cone_validator/cylinder_validator.cpp