Loading...
Searching...
No Matches
Plane Class Reference
The Plane class represents a 3D plane defined by its equation ax + by + cz + d = 0. More...
#include <plane.hpp>
Collaboration diagram for Plane:
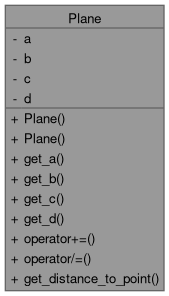
Public Member Functions | |
| Plane (double a, double b, double c, double d) | |
| Constructs a new Plane object with the specified coefficients. | |
| Plane () | |
| Constructs a new Plane object with default coefficients (0). | |
| double | get_a () const |
| Getter - Get the a component of the plane. | |
| double | get_b () const |
| Getter - Get the b component of the plane. | |
| double | get_c () const |
| Getter - Get the c component of the plane. | |
| double | get_d () const |
| Getter - Get the d component of the plane. | |
| Plane & | operator+= (const Plane &other) |
| Overloads the += operator to add another plane to this plane. | |
| Plane & | operator/= (double scalar) |
| Overloads the /= operator to divide a plane by a scalar. | |
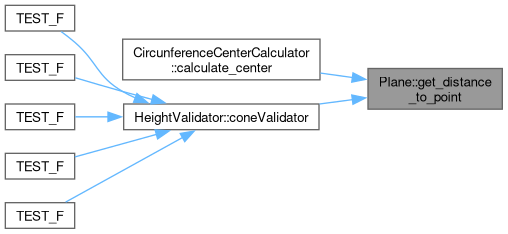
| double | get_distance_to_point (float x, float y, float z) const |
| Calculates the distance from a point to the plane. | |
Private Attributes | |
| double | a |
| double | b |
| double | c |
| double | d |
Detailed Description
The Plane class represents a 3D plane defined by its equation ax + by + cz + d = 0.
This class provides methods to manipulate and retrieve parameters of a plane, as well as calculate the distance from a point to the plane.
Constructor & Destructor Documentation
◆ Plane() [1/2]
| Plane::Plane | ( | double | a, |
| double | b, | ||
| double | c, | ||
| double | d | ||
| ) |
◆ Plane() [2/2]
| Plane::Plane | ( | ) |
Member Function Documentation
◆ get_a()
| double Plane::get_a | ( | ) | const |

◆ get_b()
| double Plane::get_b | ( | ) | const |

◆ get_c()
| double Plane::get_c | ( | ) | const |

◆ get_d()
| double Plane::get_d | ( | ) | const |
◆ get_distance_to_point()
| double Plane::get_distance_to_point | ( | float | x, |
| float | y, | ||
| float | z | ||
| ) | const |
◆ operator+=()
◆ operator/=()
| Plane & Plane::operator/= | ( | double | scalar | ) |
Member Data Documentation
◆ a
◆ b
◆ c
◆ d
The documentation for this class was generated from the following files: