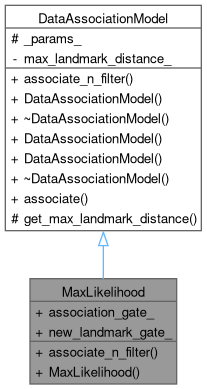
Maximum Likelihood Method class, used to match observations to landmarks in the map with maximum likelihood method It uses the Mahalanobis distance to determine the best match It also uses a gate to determine if the match is valid The Mahalanobis distance is calculated as the square root of the innovation covariance The gate is a threshold that the Mahalanobis distance must be below to be considered a valid match The gate is defined as the normalized innovation squared (NIS) gate Normalized Distance. More...
#include <data_association.hpp>
Public Member Functions | |
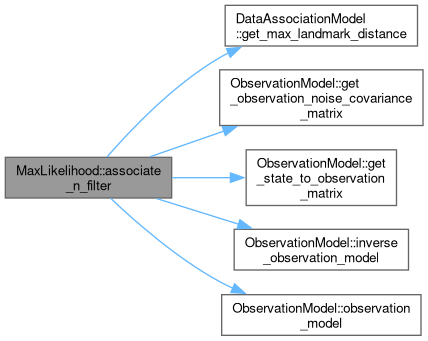
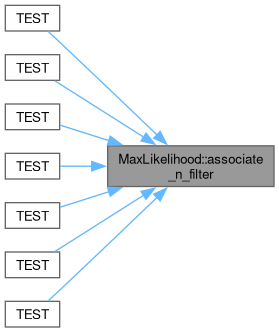
| int | associate_n_filter (const std::vector< common_lib::structures::Cone > &perception_map, Eigen::VectorXf &_x_vector_, Eigen::MatrixXf &_p_matrix_, std::vector< int > &matched_ids, std::vector< Eigen::Vector2f > &matched_cone_positions, std::vector< Eigen::Vector2f > &new_features, ObservationModel *observation_model) const override |
| normalized distance gate (closest unmatched landmark) | |
| MaxLikelihood (float max_landmark_distance) | |
| Construct a new Max Likelihood object. | |
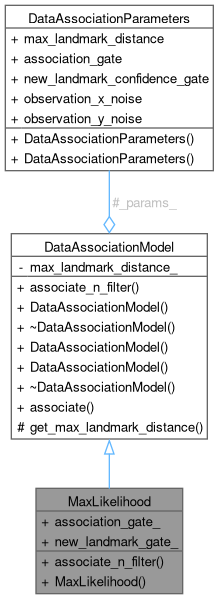
 Public Member Functions inherited from DataAssociationModel Public Member Functions inherited from DataAssociationModel | |
| DataAssociationModel (float max_landmark_distance) | |
| virtual | ~DataAssociationModel ()=default |
| DataAssociationModel ()=default | |
| DataAssociationModel (DataAssociationParameters params) | |
| virtual | ~DataAssociationModel ()=default |
| virtual Eigen::VectorXi | associate (const Eigen::VectorXd &landmarks, const Eigen::VectorXd &observations, const Eigen::MatrixXd &covariance, const Eigen::VectorXd &observation_confidences) const =0 |
| This function associates the landmarks with the observations. | |
Static Public Attributes | |
| static float | association_gate_ = 4.991f |
| static float | new_landmark_gate_ = 20.0f |
| normalized innovation squared gate | |
Additional Inherited Members | |
| Protected Member Functions inherited from DataAssociationModel | |
| float | get_max_landmark_distance () const |
| Protected Attributes inherited from DataAssociationModel | |
| DataAssociationParameters | _params_ |
Detailed Description
Maximum Likelihood Method class, used to match observations to landmarks in the map with maximum likelihood method It uses the Mahalanobis distance to determine the best match It also uses a gate to determine if the match is valid The Mahalanobis distance is calculated as the square root of the innovation covariance The gate is a threshold that the Mahalanobis distance must be below to be considered a valid match The gate is defined as the normalized innovation squared (NIS) gate Normalized Distance.
Definition at line 71 of file data_association.hpp.
Constructor & Destructor Documentation
◆ MaxLikelihood()
|
explicit |
Construct a new Max Likelihood object.
- Parameters
-
max_landmark_distance Maximum distance from the car to an observed landmark for it to be considered in the state estimation
Definition at line 20 of file data_association.cpp.
Member Function Documentation
◆ associate_n_filter()
|
overridevirtual |
normalized distance gate (closest unmatched landmark)
Associate the observed landmarks to the expected landmarks and update the state vector and the covariance matrix
- Parameters
-
perception_map The observed landmarks _x_vector_ The state vector _p_matrix_ The covariance matrix matched_ids Vector in which the ids of the matched landmarks will be placed matched_cone_positions Vector in which the positions of the matched landmarks will be placed new_features Vector in which the positions of the new landmarks (unmatched landmarks) will be placed observation_model The observation model
- Returns
- int Always 0
Implements DataAssociationModel.
Definition at line 27 of file data_association.cpp.
Member Data Documentation
◆ association_gate_
|
static |
Definition at line 75 of file data_association.hpp.
◆ new_landmark_gate_
|
static |
normalized innovation squared gate
Definition at line 76 of file data_association.hpp.
The documentation for this class was generated from the following files:
- src/ekf_state_est/include/kalman_filter/data_association.hpp
- src/ekf_state_est/src/kalman_filter/data_association.cpp