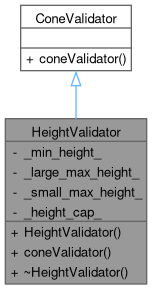
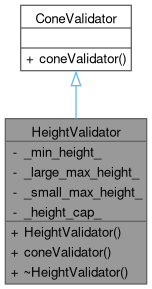
The HeightValidator class is responsible for validating cones based on their height. More...
#include <height_validator.hpp>
Public Member Functions | |
| HeightValidator (double min_height, double large_max_height, double small_max_height, double height_cap) | |
| Constructs a new HeightValidator object with the specified height threshold. | |
| std::vector< double > | coneValidator (Cluster *cone_point_cloud, Plane &plane) const override |
| Validates a cone based on its height relative to a plane. | |
| virtual | ~HeightValidator ()=default |
| Virtual destructor for HeightValidator. | |
Private Attributes | |
| double | _min_height_ |
| Min Height threshold for cone validation */. | |
| double | _large_max_height_ |
| Max Height threshold for large cones */. | |
| double | _small_max_height_ |
| Max Height treshhold for small cones */. | |
| double | _height_cap_ |
| Minimum ratio result needed for return values to not be 0. */. | |
Detailed Description
The HeightValidator class is responsible for validating cones based on their height.
This class inherits from the ConeValidator class and overrides the coneValidator method to provide height-based validation logic.
Definition at line 11 of file height_validator.hpp.
Constructor & Destructor Documentation
◆ HeightValidator()
|
explicit |
Constructs a new HeightValidator object with the specified height threshold.
- Parameters
-
min_height Min Height threshold for cone validation max_height Max Height threshold for cone validation small_max_height Max Height treshhold for small cones height_cap Minimum ratio result needed for return values to not be 0
Definition at line 3 of file height_validator.cpp.
◆ ~HeightValidator()
|
virtualdefault |
Virtual destructor for HeightValidator.
Member Function Documentation
◆ coneValidator()
|
overridevirtual |
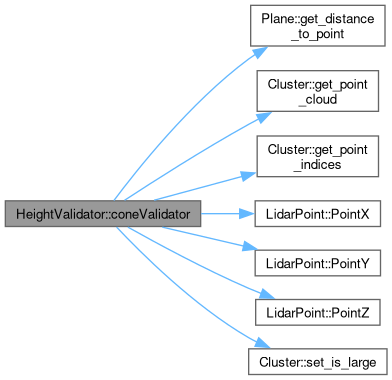
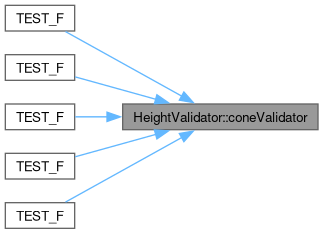
Validates a cone based on its height relative to a plane.
This method overrides the coneValidator method of the base class ConeValidator. It validates whether the given cone, represented by a point cloud cluster, meets the height criteria with respect to the provided plane.
- Parameters
-
cone_point_cloud Pointer to a Cluster object representing the point cloud of the cone. plane The plane against which the cone's height is evaluated.
- Returns
- vector containing: Index 0 -> the ratio between the clusters height and the limit, 1 if inside. Index 1 -> if in height interval, how close is it to the maximum height, else 0.
Implements ConeValidator.
Definition at line 10 of file height_validator.cpp.
Member Data Documentation
◆ _height_cap_
|
private |
Minimum ratio result needed for return values to not be 0. */.
Definition at line 49 of file height_validator.hpp.
◆ _large_max_height_
|
private |
Max Height threshold for large cones */.
Definition at line 47 of file height_validator.hpp.
◆ _min_height_
|
private |
Min Height threshold for cone validation */.
Definition at line 46 of file height_validator.hpp.
◆ _small_max_height_
|
private |
Max Height treshhold for small cones */.
Definition at line 48 of file height_validator.hpp.
The documentation for this class was generated from the following files:
- src/perception/include/cone_validator/height_validator.hpp
- src/perception/src/cone_validator/height_validator.cpp