Loading...
Searching...
No Matches
utils.hpp File Reference
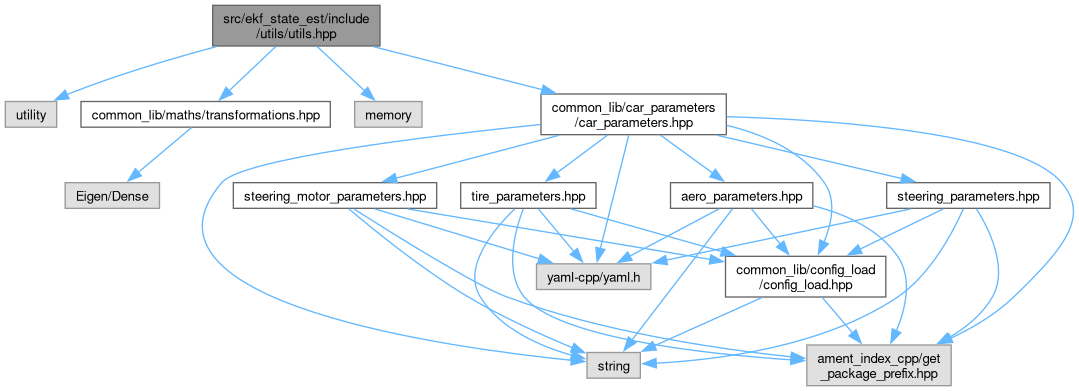
#include <utility>#include "common_lib/maths/transformations.hpp"#include <memory>#include "common_lib/car_parameters/car_parameters.hpp"
Include dependency graph for utils.hpp:
Go to the source code of this file.
Functions | |
| std::pair< double, double > | wheels_velocities_to_cg (std::shared_ptr< common_lib::car_parameters::CarParameters > car_parameters, double rl_rpm, double fl_rpm, double rr_rpm, double fr_rpm, double steering_angle) |
| Calculates the translational and rotational velocities of the vehicle from wheel rotations and steering angle. | |
Function Documentation
◆ wheels_velocities_to_cg()
| std::pair< double, double > wheels_velocities_to_cg | ( | std::shared_ptr< common_lib::car_parameters::CarParameters > | car_parameters, |
| double | rl_rpm, | ||
| double | fl_rpm, | ||
| double | rr_rpm, | ||
| double | fr_rpm, | ||
| double | steering_angle | ||
| ) |
Calculates the translational and rotational velocities of the vehicle from wheel rotations and steering angle.
- Parameters
-
rl_rpm rear left wheel rpms fl_rpm front left wheel rpms rr_rpm rear right wheel rpms fr_rpm front right wheel rpms steering_angle steering angle in radians
- Returns
- std::pair<double, double> translational velocity, rotational velocity
Definition at line 3 of file utils.cpp.
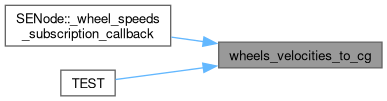
Here is the call graph for this function:

Here is the caller graph for this function: